

An automatic ball-swinging robot capable of recognizing billiard ball numbers
A technology of robots and billiards, applied in the field of billiards identification, can solve problems such as large expenses, wasting time, and non-standard artificial swinging positions.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
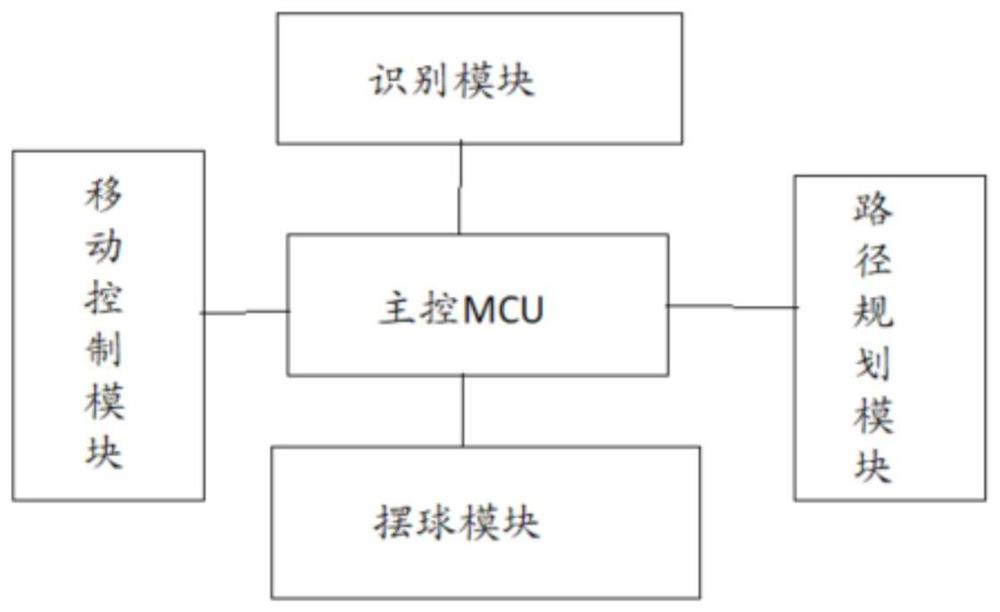
[0072] as attached figure 1 As shown, the present invention is a kind of automatic ball swinging robot capable of identifying billiard ball numbers, which includes:
[0073] Recognition module: used to take high-definition pictures on the billiard table and identify the number of each billiard ball in the high-definition pictures;
[0074] Swing ball module: used to place billiard balls on the billiard table according to receiving swing ball instructions; among them,
[0075] The swinging ball instruction includes a real-time user input instruction and a default swinging ball instruction;
[0076] Mobile control module: used to control the movement and movement direction of the swing ball device; wherein,
[0077] The direction of movement includes front-back direction, left-right direction and up-down direction;
[0078] Path planning module: used to generate a swing ball path planning instruction according to the high-definition picture and the swing ball instruction, and...
Embodiment 2
[0083] As an embodiment of the present invention: the recognition device includes a recognition processor, a storage device and an image acquisition device, and the image acquisition device and the storage device are electrically connected to the recognition processor; wherein
[0084] The image acquisition device includes a first camera unit and a second camera unit; wherein,
[0085] The first camera unit is used to take high-definition pictures of the entire billiard table top; and is used to determine the high-definition pictures of the billiard table top.
[0086] The second camera unit is used to single-identify the billiard ball directly below when the recognition device moves to the upper part of any billiard ball on the billiard table, and obtain a single picture of the billiard ball; Accurate identification.
[0087] The first camera unit is a dot matrix camera, and the second camera unit is a small viewing angle high-definition camera;
[0088] The storage device ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More