

Cascaded multi-finger cross manipulator
A manipulator and cascading technology, applied in the field of robotics, can solve problems such as high cost, small grasping size range, cumbersome control algorithm, etc., and achieve the effect of ensuring stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] The present disclosure will be further described in detail below with reference to the drawings and embodiments. It can be understood that the specific implementation manners described here are only used to explain relevant content, rather than to limit the present disclosure. It should also be noted that, for ease of description, only parts related to the present disclosure are shown in the drawings.
[0017] It should be noted that, in the case of no conflict, the implementation modes and the features in the implementation modes in the present disclosure can be combined with each other. The present disclosure will be described in detail below with reference to the drawings and embodiments.
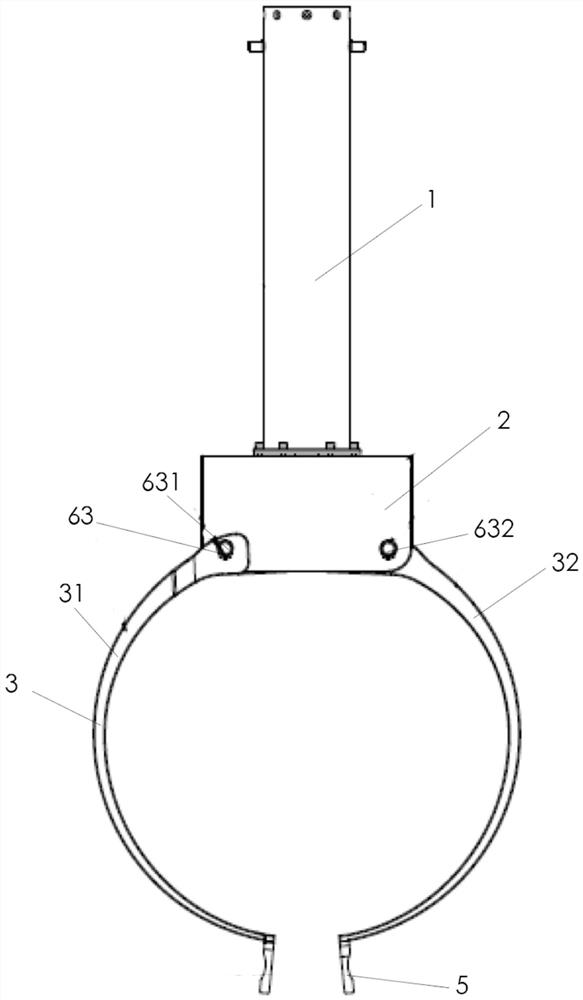
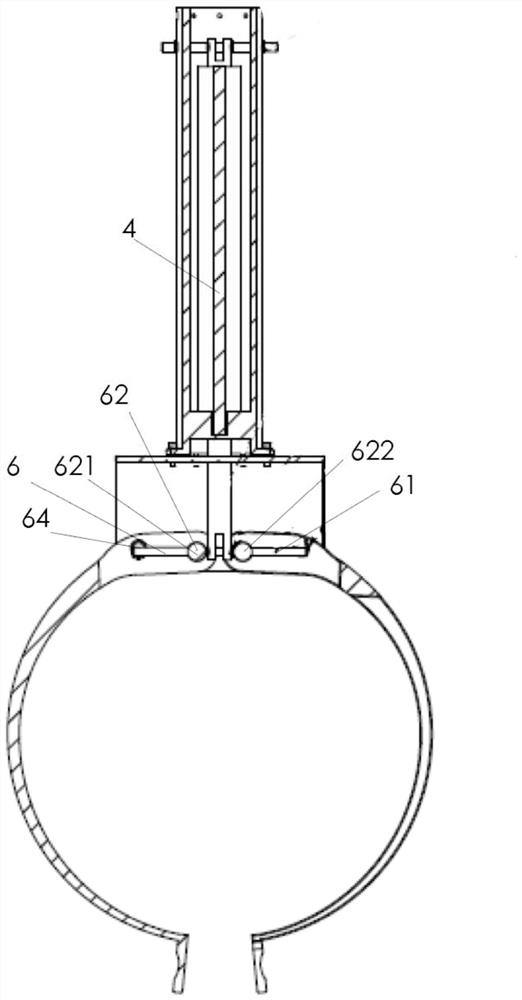
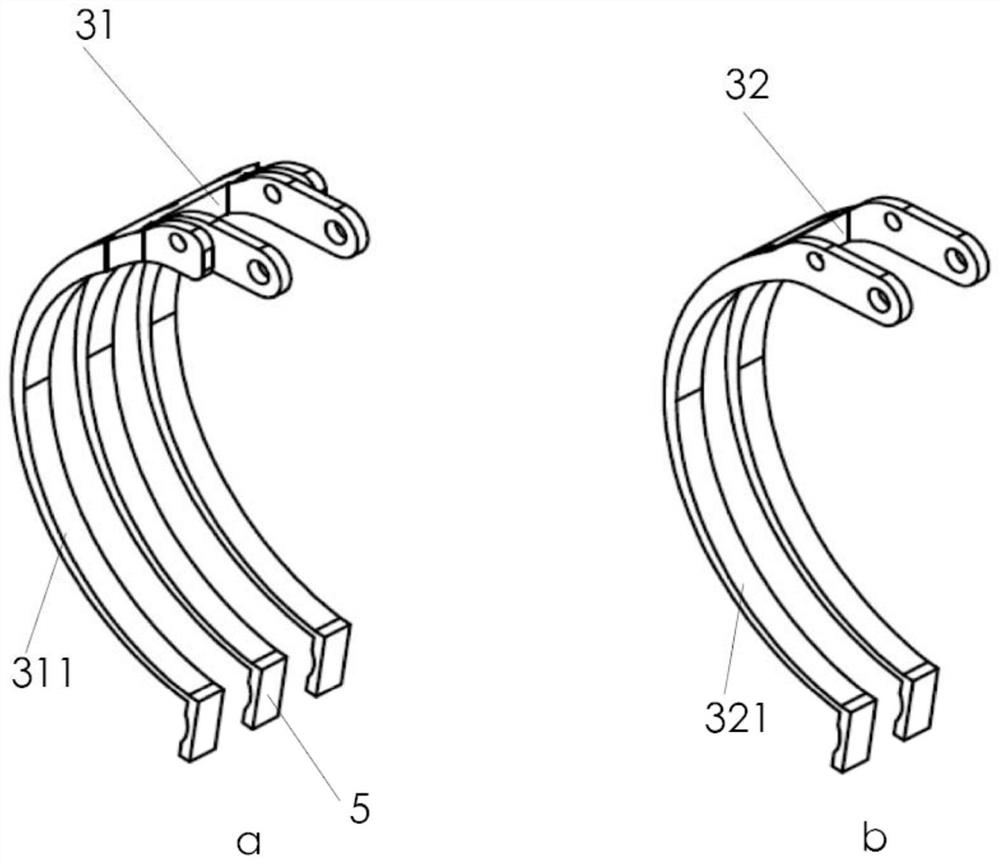
[0018] Such as figure 1 and image 3 As shown, the present disclosure provides a cascaded multi-fingered manipulator, including an arm 1, a fixing seat 2, a gripper 3, a pen type electric push rod 4 and an auxiliary grasping structure 5, and the arm 1 is connected by a screw T...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More