Large-view single-texture active projection module and 3D camera
A projection module and large field of view technology, applied in the field of 3D vision, can solve problems such as complex optical path design, expensive cost, etc., achieve high resolution, energy concentration, and improve use efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
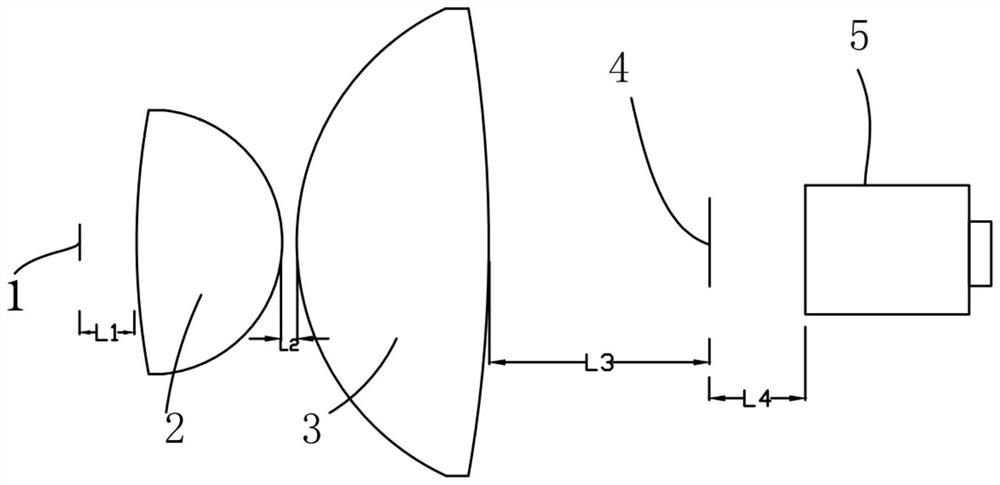
[0044] Such as figure 1 As shown, the present invention discloses a large-view single-texture active projection module (hereinafter referred to as the active projection module), which includes a coaxially arranged high-brightness LED light source 1, a lens module, and a mask plate 4 in sequence.
[0045] The LED light source 1 is used to provide detection light;
[0046] After the detection light is collected, converged, collimated, and shaped by the lens module, a modulated light beam with a cross-sectional shape consistent with the mask and a cross-sectional size slightly larger than the mask is formed and irradiated to the mask. The mask plate 4; the mask plate 4 is provided with a mask pattern with an aperture of micron level, and the mask pattern includes transparent features for transmitting the modulated light beam and opaque features for blocking the modulated light beam feature.
[0047] The active projection module of a single texture with a large field of view sho...
Embodiment 2
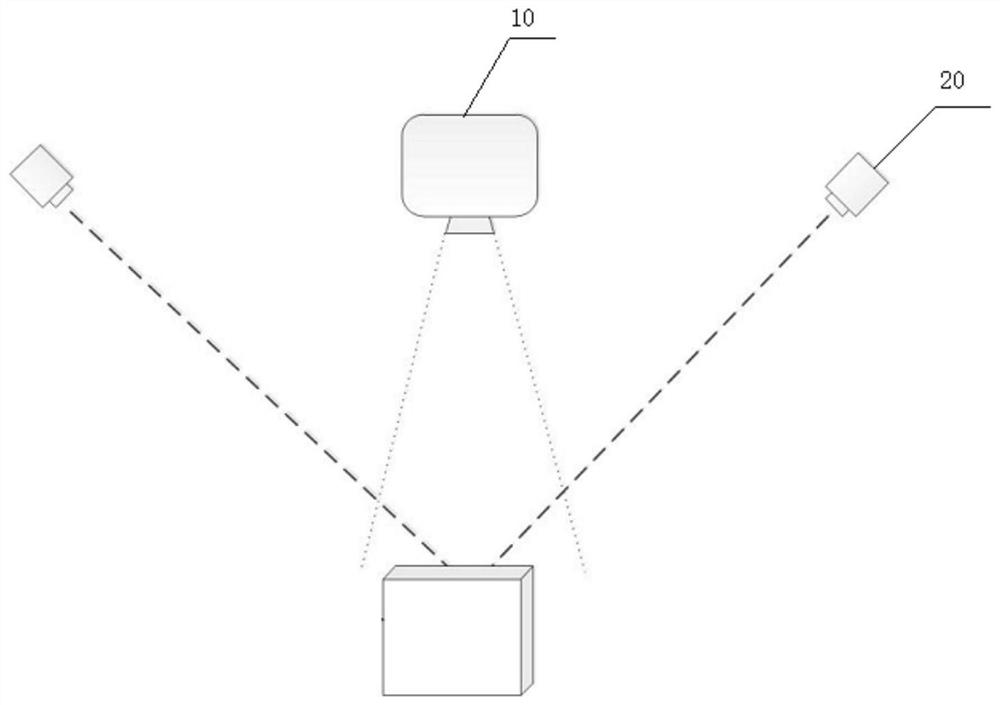
[0067] The present invention also discloses a 3D camera, including a large field of view single texture active projection module 10 as described in Embodiment 1 and two industrial cameras 20, the two industrial cameras 20 are located in the projection module The two sides of the group, and the projection range of the projection module 10 is within the respective image collection ranges of the two industrial cameras 20 .
[0068] Such as figure 2 As shown, a 3D camera shown in the present invention is based on the principle of binocular parallax, and the left and right industrial cameras 20 simultaneously shoot the object to be measured with a projection pattern, and take the left camera as a reference, and aim at each pixel point in the epipolar direction Traverse the right camera image and calculate the correlation point by point. If the correlation matching condition is met, triangulation is performed and the spatial information is output. By sequentially traversing each f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More