

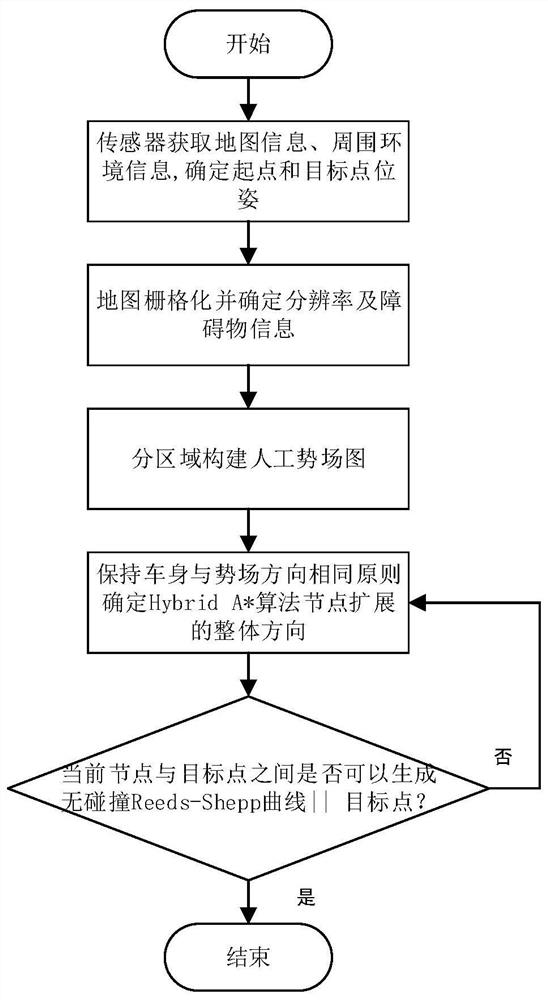
Hybrid A* autonomous parking path planning method based on artificial potential field guidance
An artificial potential field and path planning technology, applied in navigation, surveying and navigation, road network navigator, etc., can solve problems such as slow convergence speed, large number of node expansion, and lack of directional information
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
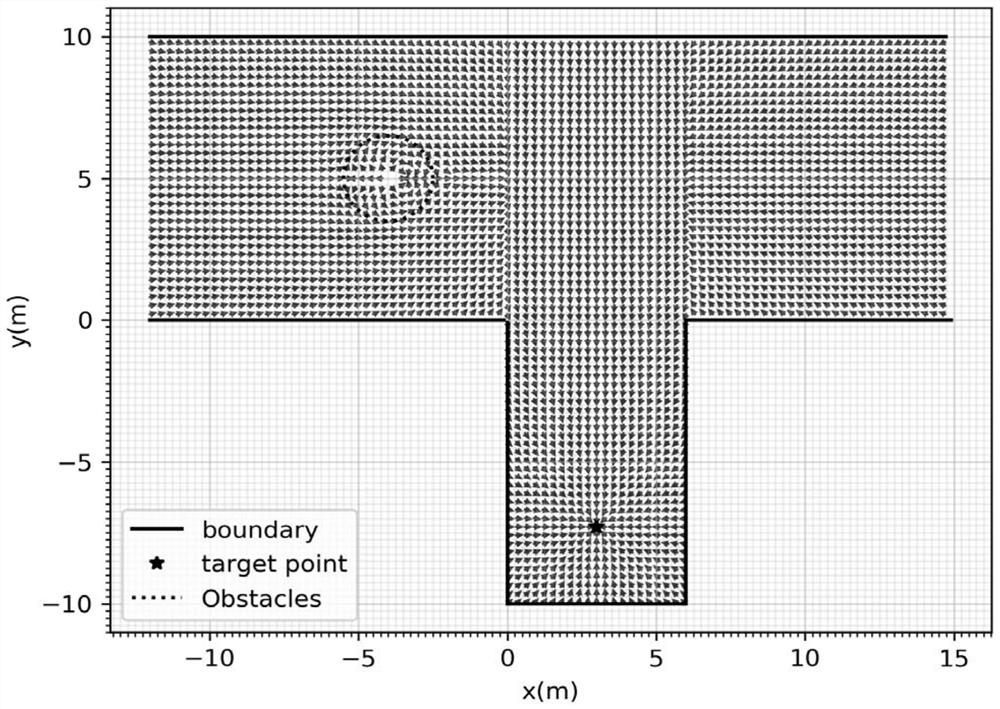
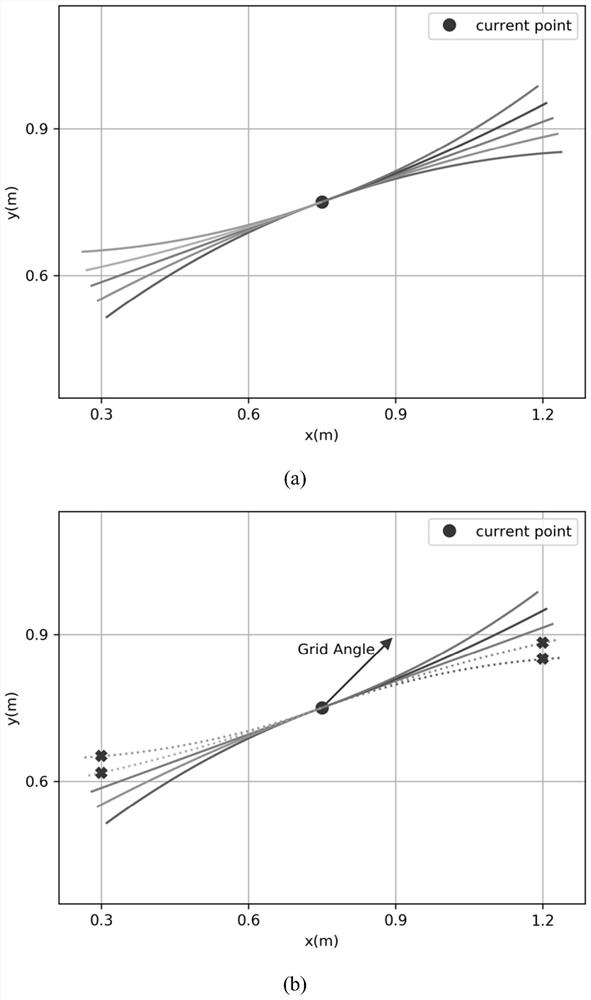
[0050]The application scenario of this embodiment is set to standard vertical parking scene, mainly compared to the performance of the parking path planning algorithm before and after the introduction of the manual potential boot information. This embodiment mainly includesfigure 2 The establishment of the artificial field map shown, such asimage 3 The Hybrid A * algorithm expanded details, etc.Figure 4 As shown, the main performance index analysis is shown in Table 1, where the Total Time refers to the overall consumption of the path planning, the Node number is the number of nodes accessed by the Hybrid A * algorithm in the generation of the final path result, the RS invalid connection The algorithm attempts to connect the current node and destination point at each loop, but does not pass collision detection, resulting in the total number of incomplete times of the operation, and can be seen by RS TIME, the less invalid connection, the more algorithm time short. PATH refers to the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More