

A sampling robot for food testing
A technology of food testing and robotics, which is applied in the direction of sampling devices, etc., can solve the problems of different sampling methods, grasping failure, and labor-intensive problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] Embodiments of the present invention will be described below with reference to the accompanying drawings. During this process, in order to ensure the clarity and convenience of the description, we may exaggerate the width of the lines or the size of the components in the illustrations.
[0030] In addition, the following term is defined based on the function in this invention, and may differ according to a user, an operator's intention, or convention. Therefore, these terms are defined based on the entire content of this specification.
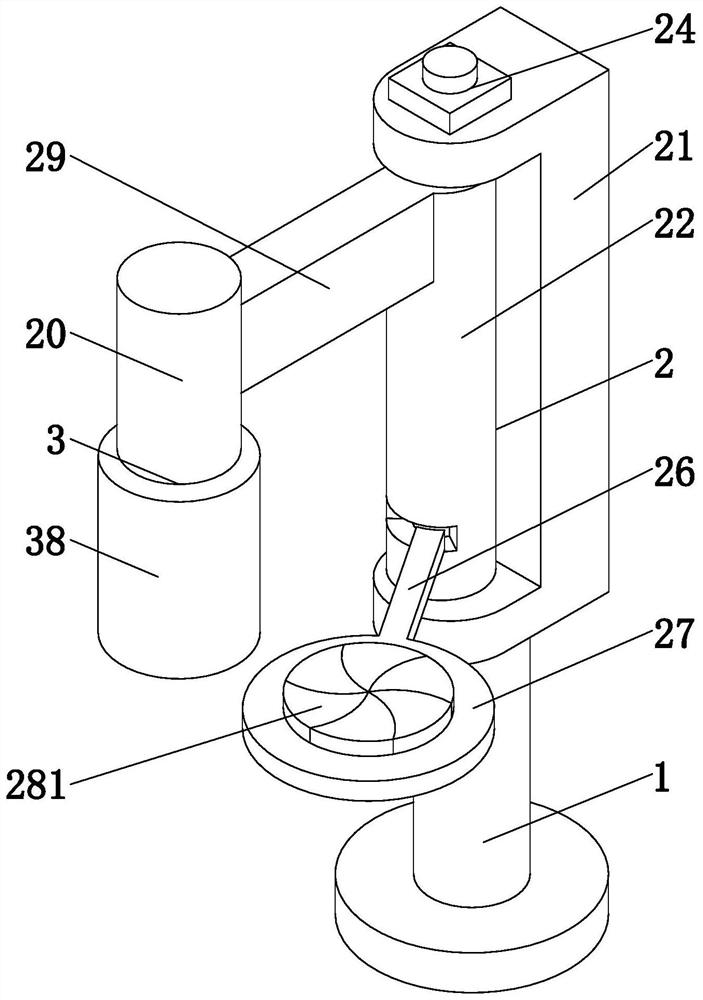
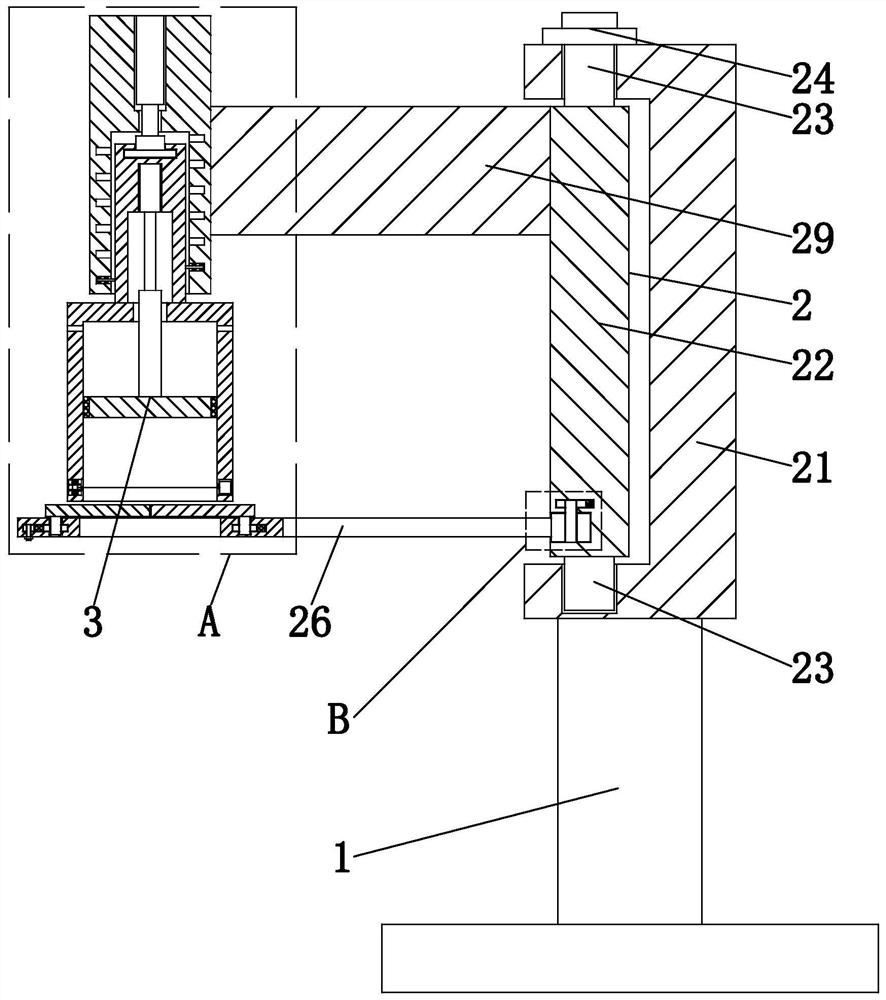
[0031] like Figure 1 to Figure 9 As shown, a sampling robot for food detection includes a mounting frame 1, a supporting rotating mechanism 2 and a sampling grabbing mechanism 3, the supporting rotating mechanism 2 is fixedly installed on the mounting frame 1, and the supporting rotating mechanism 2. A sampling grabbing mechanism 3 is fixedly installed; wherein:
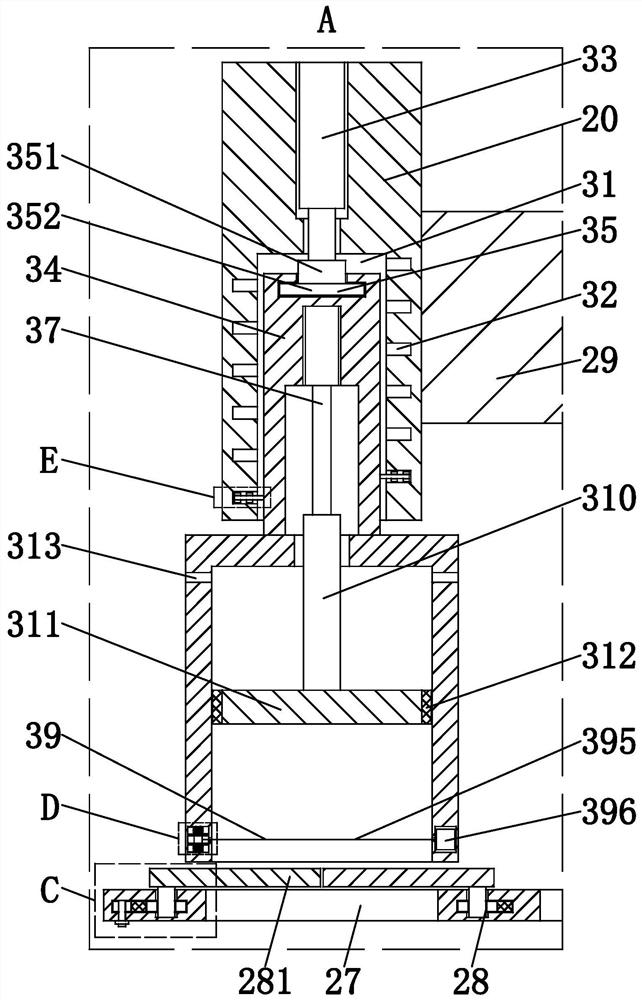
[0032]The sampling grabbing mechanism 3 includes a lifting groove 31,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More