

Object recognition method and device
An object recognition and object technology, applied in the field of image recognition, can solve problems such as cumbersome recognition steps, changes in national administrative divisions, and low recognition rates
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
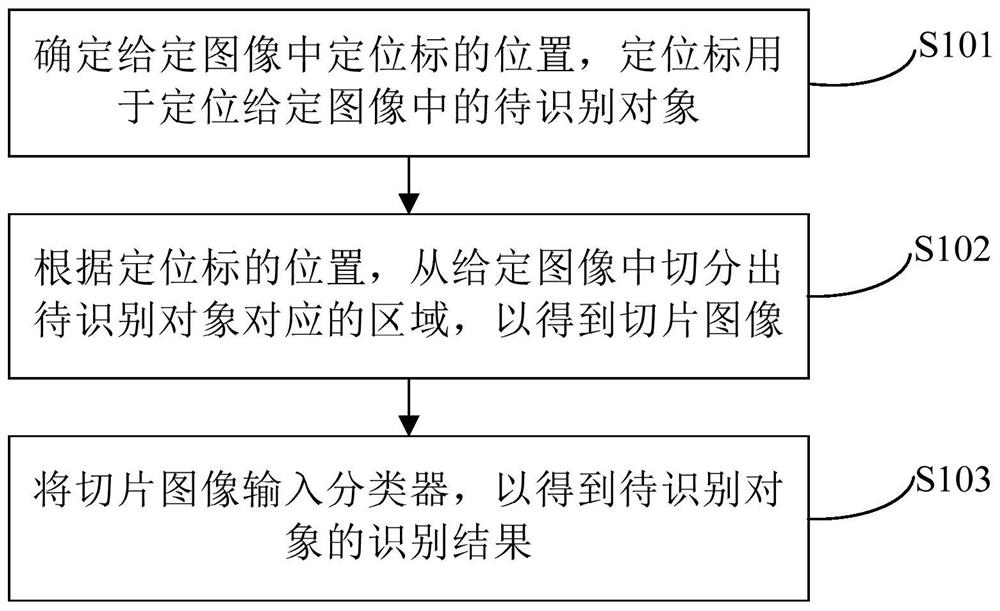
[0057] There is one positioning mark, and the positioning mark frame corresponds to the positioning mark one by one, that is, the position of the positioning mark frame in the template image is the same as the position of the positioning mark in the given image, and the position of the positioning mark frame and the slice frame in the template image And the position of the positioning mark in the given image is known, and the relative position between the positioning mark and the object in the image is fixed, then the distance between the positioning mark frame and the slice frame in the template image, and between the positioning mark and the slice frame in the given image The regions corresponding to the objects to be recognized have the same positional relationship. The position of the slice image in the given image can be calculated from the relative positional relationship between the positioning mark frame in the template image and the positioning mark of the given image ...
Embodiment 2
[0060] The number of the anchors of the given image and the number of the anchor frames of the template image are preset, and the anchor frames correspond to the anchors one by one.
[0061] Determine the first relative positional relationship between the positioning mark frame in the template image and the positioning mark in the given image, and determine and segment the object to be recognized in the given image according to the first relative positional relationship and the position of the slice frame in the template image The corresponding area may specifically include: calculating the second relative positional relationship between each positioning mark frame in the template image and the corresponding positioning mark in the given image; using each second relative positional relationship to calculate all positioning positions of the given image According to the optimal relative positional relationship and the position of the slice frame in the template image, determine a...
Embodiment 3
[0067] Determine the first relative positional relationship between the positioning mark frame in the template image and the positioning mark in the given image, and determine and segment the object to be recognized in the given image according to the first relative positional relationship and the position of the slice frame in the template image The corresponding area includes: determining the third relative positional relationship between the reference point of the positioning mark frame in the template image and the reference point of the positioning mark in the given image; according to the third relative positional relationship, the given image and the template image The zoom ratio and the position of the slice frame in the template image determine and segment the area corresponding to the object to be recognized in the given image. Specifically, the third relative positional relationship may be the coordinate offset between the reference point of the anchor frame in the t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More