Parallel parking trajectory planning method based on vehicle kinematic model
A kinematic model and parallel parking technology, which is applied in the field of parallel parking trajectory planning based on the vehicle kinematics model, can solve problems such as uneven path curvature changes, lack of flexibility in curves, and increased parking space, making it easy to track Controlling and simplifying the difficulty of parking and the effect of small parking space
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The present invention will be further described in detail below in conjunction with specific embodiments.
[0037] In this example, vehicle structural parameters, road environment parameters, maximum angle values, maximum speed change rate and speed change rate are shown in the table below.
[0038] Table 1 Track planning simulation parameters
[0039]
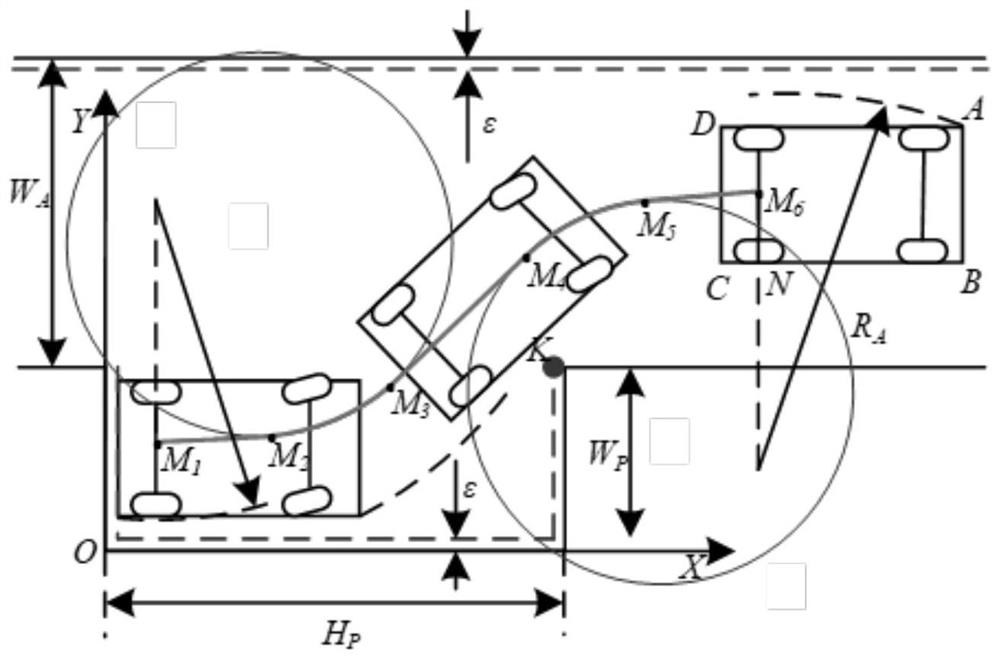
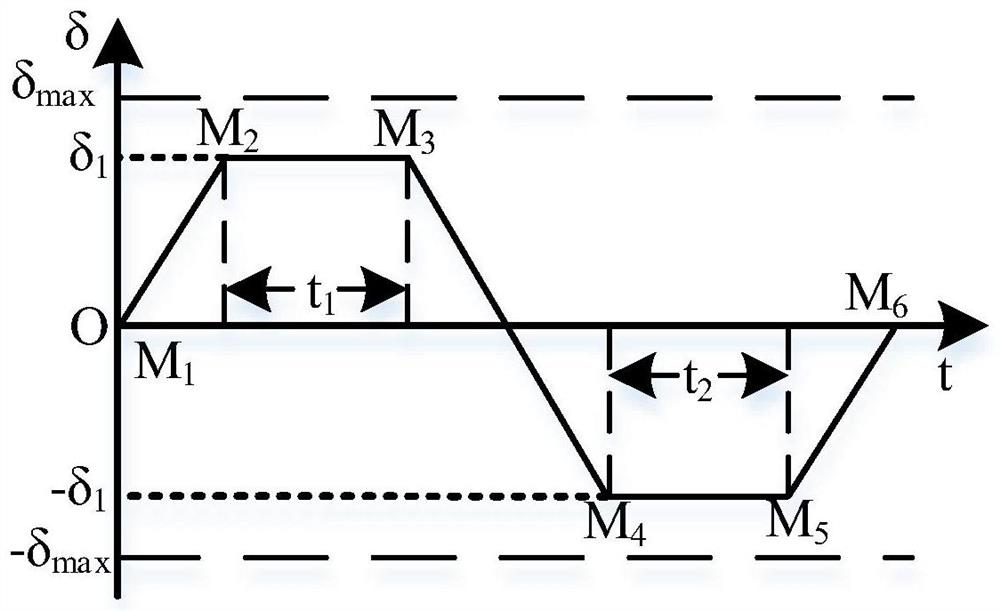
[0040] Establish a parallel parking model such as figure 2 The display, where W A W P , H P And ε are road width, parking space width, parking length and safety distance. For the vehicle system, a certain angle and speed input are given, then the vehicle will move to generate a motion trajectory. According to this feature, combined with the rotation angle and speed change trend, when a given vehicle system is image 3 with Figure 4 The rotation angle and speed input shown will result figure 2 Middle M 1 → M 2 → ... → m 6 Sports trajectory, trajectory start point M 1 The status is: according to image 3 The correlation betw...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com