

Four-wheel-drive control method for pure electric vehicle with dual-drive bridge structure
A technology of pure electric vehicle and control method, applied in the field of pure electric vehicle control, can solve the problems of unreasonable configuration of output torque and the like
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
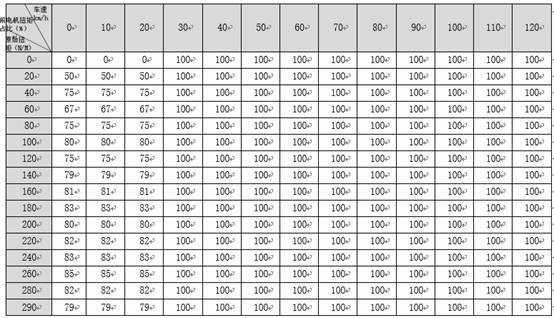
[0035] Dual drive bridge architecture pure electric vehicle four-wheel drive control method, the content, through the linear interpolation method, the torque allocation of the front and rear motor is realized by linear interpolation method:
[0036] Request torque (also known as original torque) is 0: The motor torque is 0 when the vehicle speed is 0, and the speed of the motor torque is 0. when the speed is 10km / h, and the speed of the motor torque is for the speed of 20 km / h. 0, the speed of the motor torque is 100% in the speed of 30km / h-120km / h;
[0037] Request torque is 20 N · m: The speed of the motor torque is 50% when the speed is 0, and the speed of the motor torque is 50%, the speed of 20 km / h is 50%, and the motor torque is 50. %, The speed of the motor torque is 100% in the speed of 30km / h-120km / h;
[0038] Request torque is 40 n · m: The speed of the motor torque is 75% when the vehicle speed is 0, and the speed of the motor torque is 75%, the speed of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More