

Obstacle collision avoidance method based on dynamic security domain and collision avoidance rule
A dynamic safety field and obstacle technology, applied in non-electric variable control, two-dimensional position/channel control, instruments, etc., can solve the problems of inability to adjust the size of the collision avoidance area, long collision avoidance trajectory, and collision risk, etc. Avoid long invalid collision avoidance paths, solve the effect of increasing collision avoidance energy consumption, and avoid collision risks
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
[0048] All technical and scientific terms used in the examples of the present invention have the same meaning as commonly understood by one of ordinary skill in the technical field of the present invention. The terms used in the description of the present invention in the embodiments of the present invention are only for the purpose of describing specific embodiments, and are not intended to limit the present invention. The term "and / or" used in the examples of the present invention includes any and all combinations of one or more of the associated listed items.
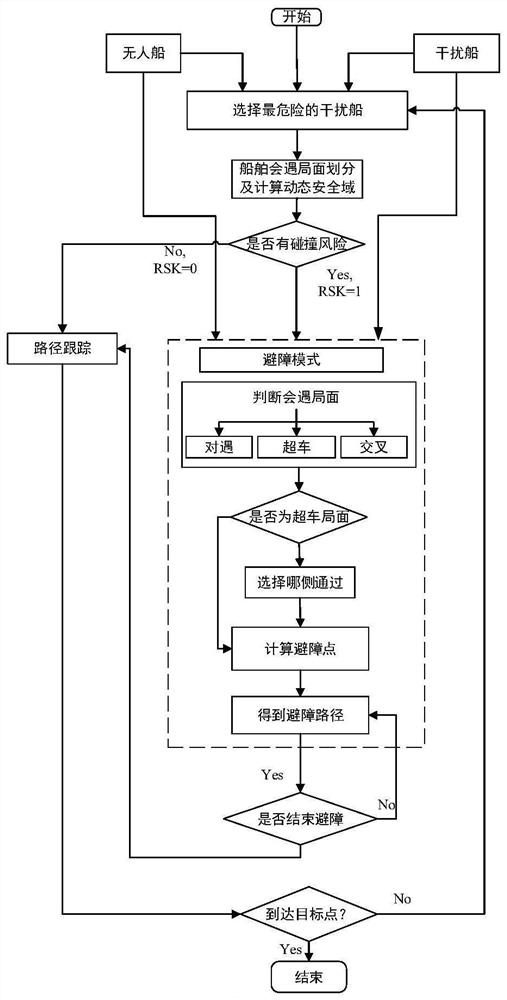
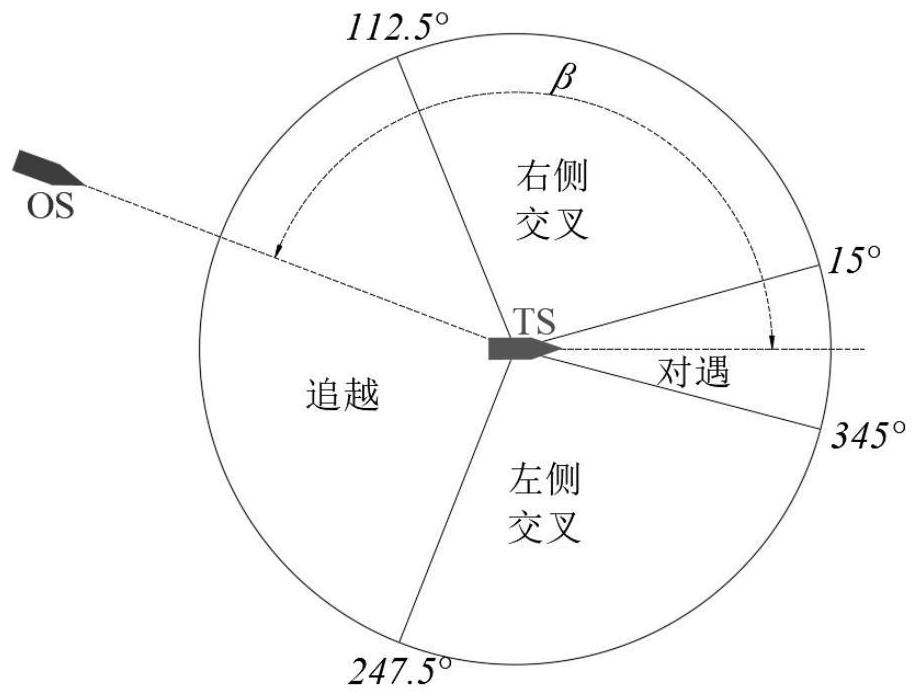
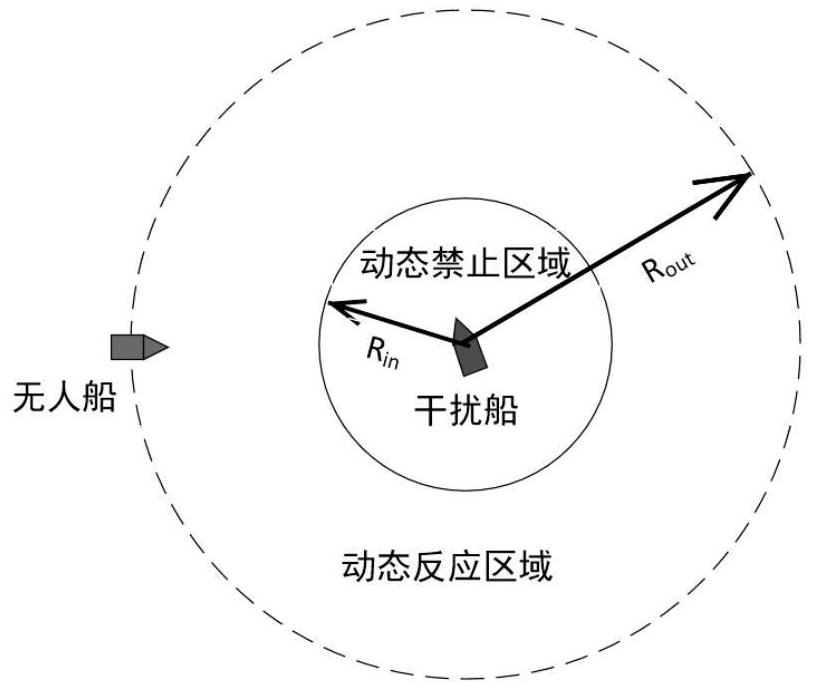
[0049] On the basis of the collision avoidance of the unmanned ship, the invention comprehensively considers the influence of the interfering ship on the unmanned ship, and proposes an ob...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More