

Two-degree-of-freedom floating device for robot gripper
A floating device and robot technology, applied in the field of robots, can solve problems such as difficulty in meeting assembly requirements, and achieve the effects of energy-saving operation, compact overall structure, and reliable locking
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The present invention will be described in further detail below in conjunction with the accompanying drawings.
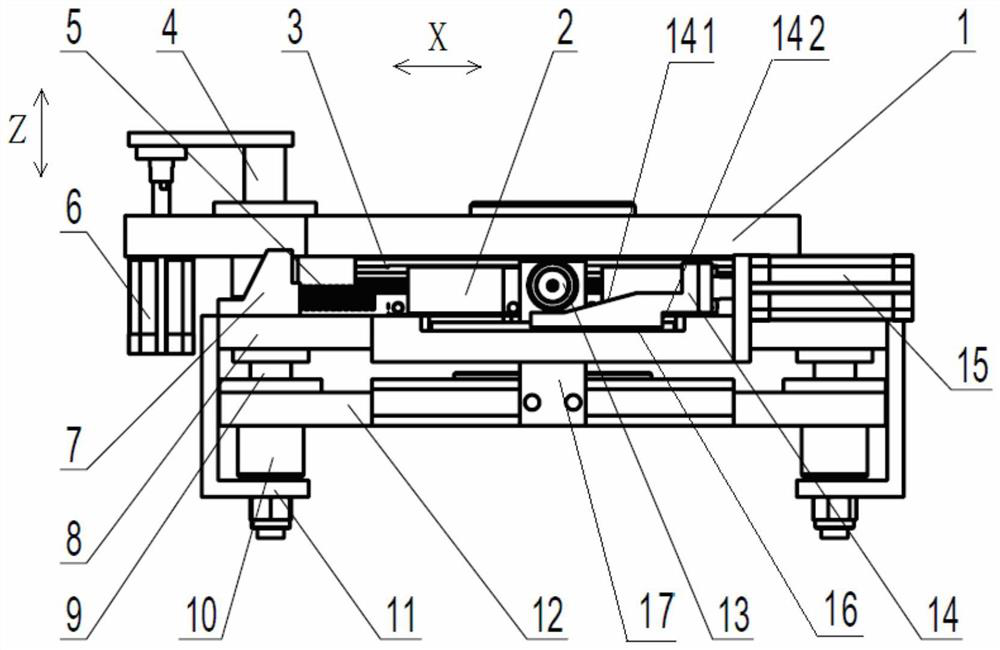
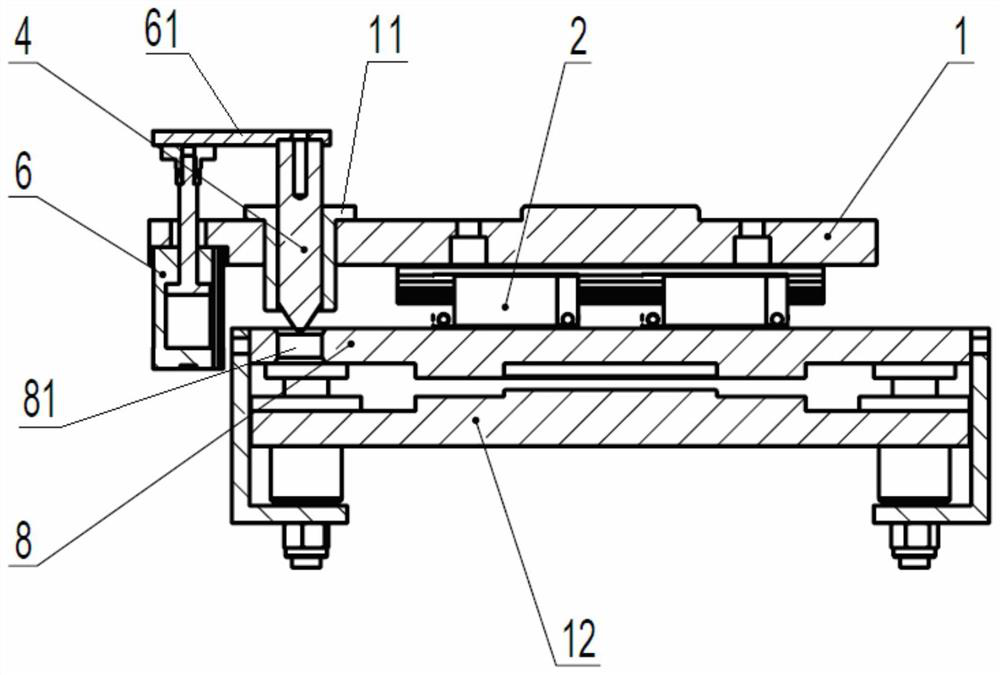
[0024] Such as Figure 1~2 As shown, the present invention includes a robot mounting plate 1, a mounting base plate 8, a jaw mounting plate 12, an X-axis locking mechanism and a Z-axis locking mechanism, wherein the mounting base plate 8 is mounted on the robot mounting plate 1 movably along the X direction, and clamping The claw mounting plate 12 is mounted on the mounting base 8 movably along the Z axis, the X-axis locking mechanism is arranged on the robot mounting plate 1, and the mounting base 8 is locked by the X-axis locking mechanism, and the Z-axis locking mechanism is located on the The mounting base plate 8 and the jaw mounting plate 12 are locked by the Z-axis locking mechanism. When the present invention works, the robot mounting plate 1 is connected to the end of the robot, and the jaw mounting plate 12 is connected to the jaws.
[0025] Such ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More