

Point cloud and picture fusion annotation method and system
A picture and point cloud technology, which is applied in image enhancement, image analysis, image data processing, etc., can solve the obstacles of not being able to obtain and display the 3D data of the target object, not being able to ensure that the attributes of point cloud annotations are completely matched, model building, training and optimization and other problems to achieve the effect of solving repeated labeling, saving labeling time and cost, and good attribute matching and correlation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0046] The principles and features of the present invention are described below in conjunction with the accompanying drawings, and the examples given are only used to explain the present invention, and are not intended to limit the scope of the present invention.
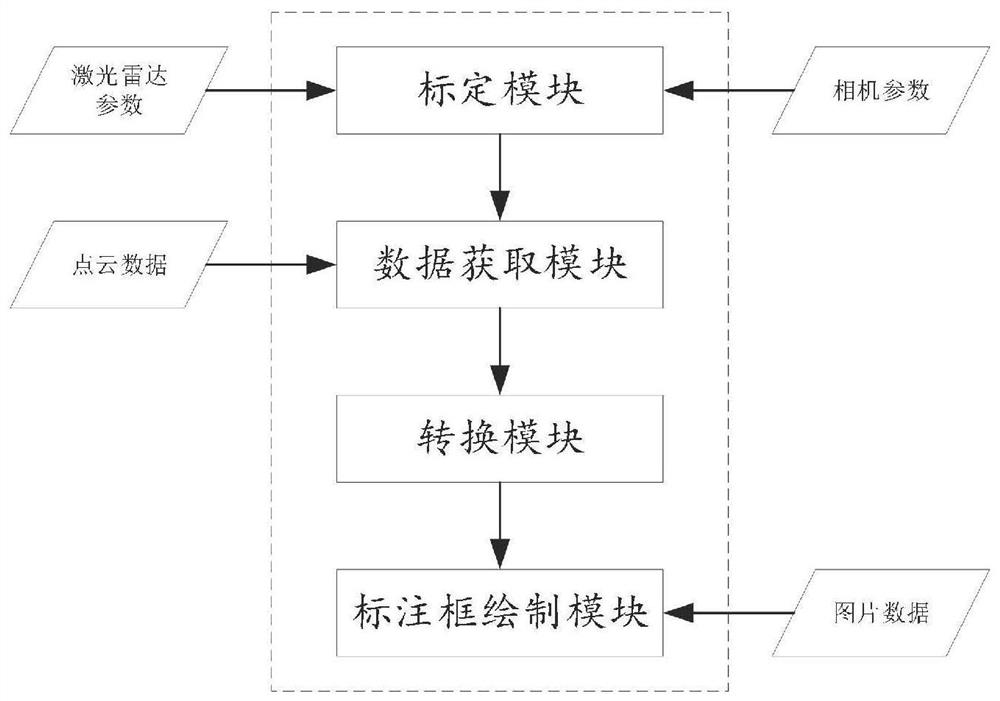
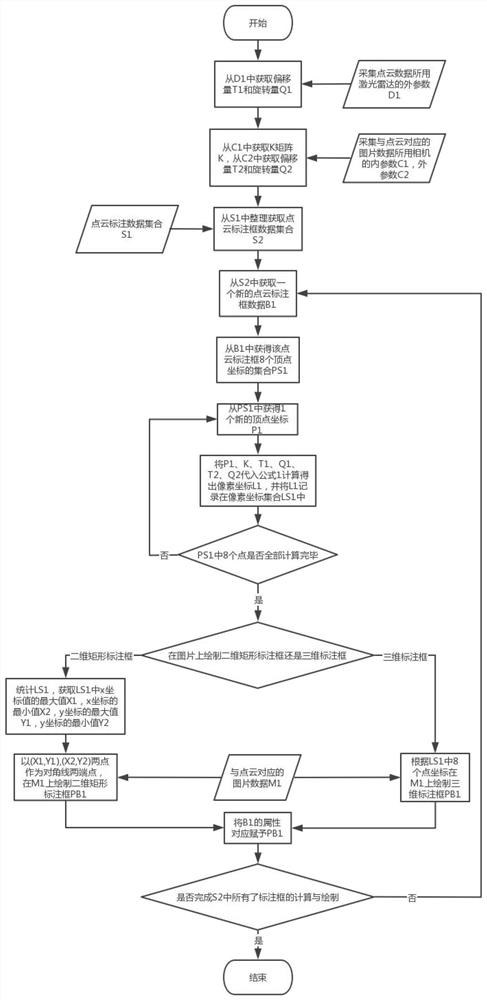
[0047] Such as figure 1 As shown, the present invention provides a system for point cloud and picture fusion labeling, including:
[0048] The calibration module is used to obtain the laser radar offset and rotation from the external parameters of the laser radar, obtain the camera offset and rotation from the external parameters of the camera, and obtain the K matrix from the internal parameters of the camera;
[0049] The data acquisition module is used to obtain the point cloud annotation frame set S from the point cloud annotation data, and the three-dimensional coordinate set PSi of 8 vertices of any annotation frame Bi in S;
[0050] The conversion module is used to calculate the corresponding 8 pixel coordin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More