

Landing method and device of unmanned aerial vehicle, unmanned aerial vehicle and medium
A technology of unmanned aerial vehicles and landing points, which is applied in the field of unmanned aerial vehicles, can solve problems such as easy collision with obstacles, secondary accidents, uncertain factors, etc., and achieve the effect of improving landing safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
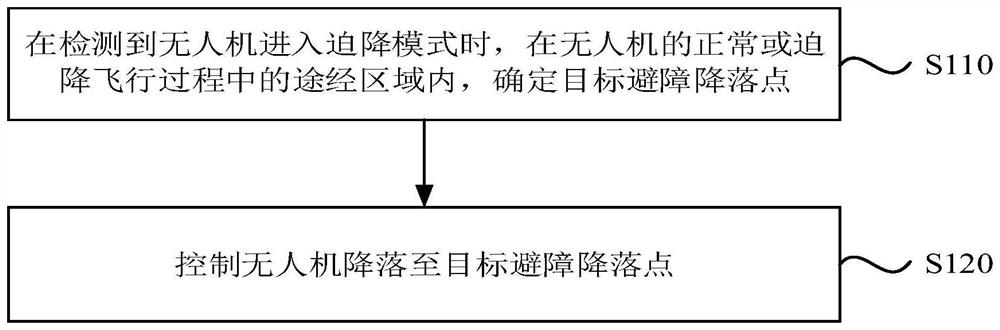
[0033] figure 1 It is a flow chart of a landing method for a drone provided by Embodiment 1 of the present invention. This embodiment is applicable to the situation where the drone is forced to land while avoiding obstacles to land. This method can be implemented by the landing device of the drone. For execution, the device may be implemented in software and / or hardware. The device can be configured in a drone. Such as figure 1 As shown, the method includes:
[0034] Step S110, when it is detected that the UAV enters the forced landing mode, determine the target obstacle avoidance landing point in the passing area of the UAV during normal or forced landing flight.
[0035] Among them, the forced landing mode can be used to instruct the UAV to make a forced landing. For example, in scenarios where the UAV loses contact or malfunctions, the UAV can enter the emergency landing mode to make an emergency landing. In a specific embodiment, during the flight of the UAV, the co...
Embodiment 2
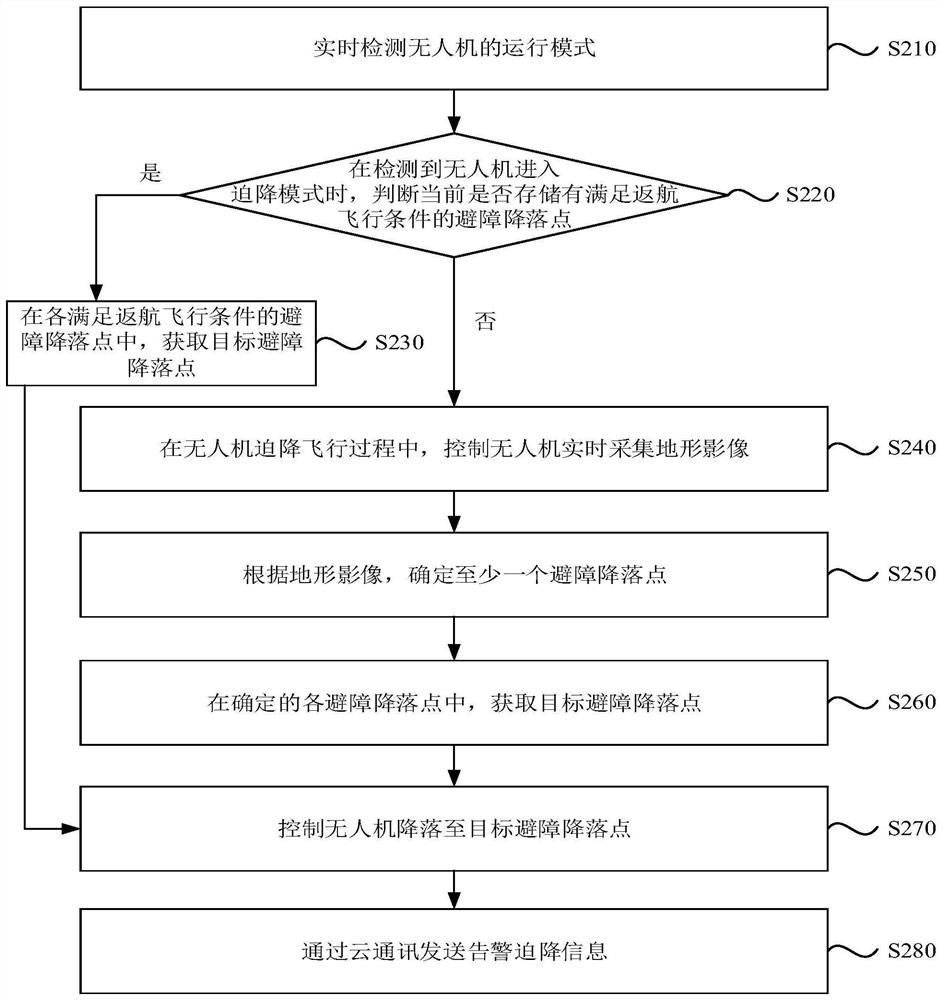
[0042] figure 2 It is a flow chart of another drone landing method provided by Embodiment 2 of the present invention. This embodiment is optimized on the basis of the above embodiments, as figure 2 As shown, the method includes:
[0043] Step S210, real-time detection of the operating mode of the drone.
[0044] Wherein, the drone may at least include a camera terminal, a visual CPU (Central Processing Unit, central processing unit) processing center and a flight control terminal. The camera end can be used to collect terrain images in real time. Vision CPU processing center can be used to process data. The flight control terminal can be used to control the flight of the drone.
[0045]The operating modes may include but not limited to normal flight mode, forced landing mode, route task execution mode and take-off mode, etc. Normal flight mode is used to instruct the drone to fly normally. The forced landing mode is used to instruct the UAV to make an emergency landing...
Embodiment 3
[0100] Figure 8 It is a flow chart of another drone landing method provided by Embodiment 3 of the present invention. This embodiment is optimized on the basis of the above embodiments, such as Figure 8 As shown, the method includes:
[0101] Step S3010, during the flight of the drone, detect the operating mode of the drone in real time.
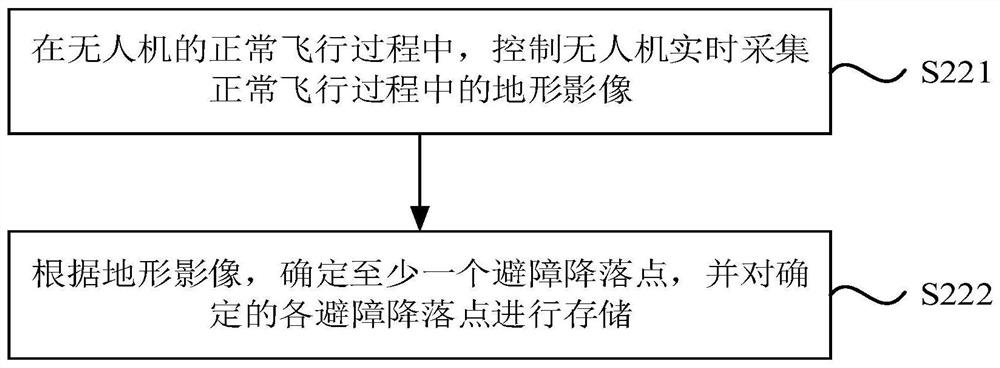
[0102] Step S3020 , during the normal flight of the UAV, control the UAV to collect terrain images during the normal flight in real time.
[0103] Step S3030: Determine at least one obstacle avoidance landing point according to the terrain image, and store the determined obstacle avoidance landing points.
[0104] Among them, the type of the obstacle avoidance landing point is determined based on the preset landing site conditions, the landing site conditions include optimal landing conditions and suboptimal landing conditions, and the types of obstacle avoidance landing points include optimal obstacle avoidance landing points and subopt...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More