

A camera optical axis pointing visual measurement method
A technology of visual measurement and optical axis pointing, applied in the field of robot vision, can solve the problems of time-consuming and laborious, can not guarantee the verticality of the main optical axis of the camera and the visual grasping plane, etc., to reduce workload and improve work efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
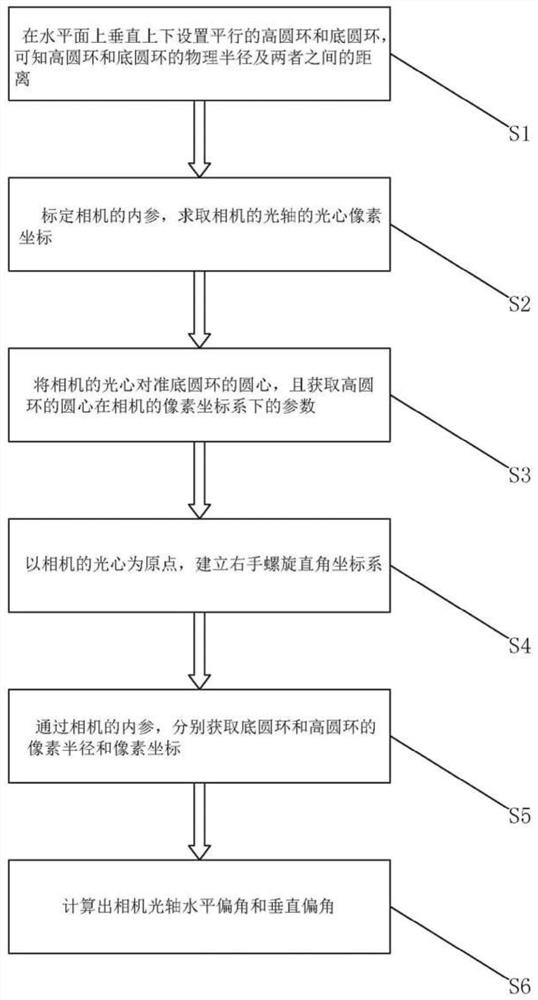
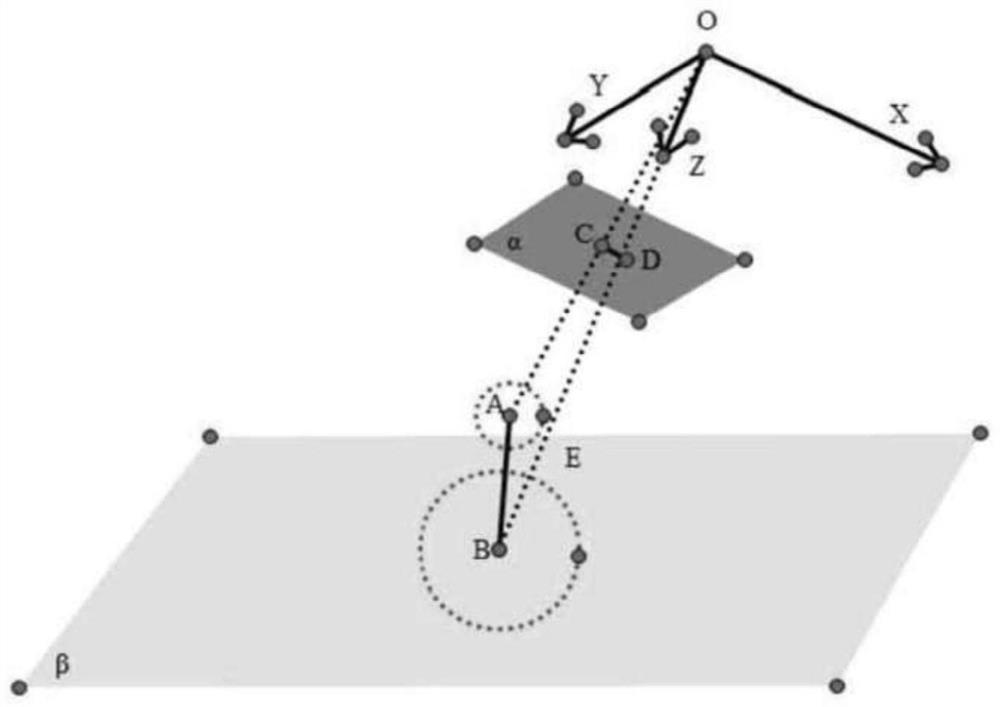
[0022] like figure 1 and figure 2 As shown, the present invention provides a camera optical axis pointing visual measurement method, comprising the following steps:
[0023] Step S1, set parallel high ring and bottom ring vertically up and down on the horizontal plane, it is known that the physical radius of the high ring and the bottom ring and the distance between them;
[0024] Step S2, calibrating the internal parameters of the camera, and obtaining the optical center pixel coordinates of the optical axis of the camera;
[0025] Step S3, align the optical center of the camera with the center of the bottom ring, and obtain the coordinates of the center of the high ring in the pixel coordinate system of the camera;
[0026] Step S4, establishing a right-handed spiral rectangular coordinate system with the optical center of the camera as the origin;
[0027] Step S5, obtain the pixel radius and pixel coordinates of the bottom ring and the high ring respectively through th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More