

High-precision micro-displacement actuator utilizing threaded parallel structure
A high-precision, parallel technology, applied in the field of lithography machines, can solve the problems of unavoidable displacement output backlash, complex displacement actuator structure, limited stroke amplification capability, etc., to achieve convenient design and processing, simple structure, and improved output. The effect of precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
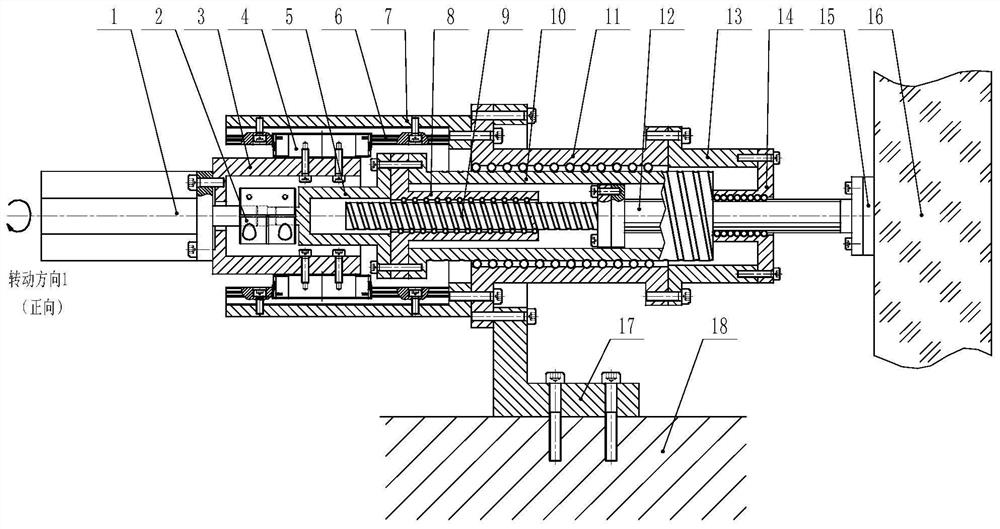
[0023] Such as figure 1 As shown, a high-precision micro-displacement actuator using a threaded parallel structure in this implementation includes two sets of parallel threaded screw structures, that is, the parallel threaded screw structure refers to the first threaded screw (9) and The first screw nut (8) is placed inside the second threaded screw (10) (hollow). Specifically, the actuator includes a first threaded screw 9 and a second threaded screw 10 (hollow), the first threaded screw 9 and the second threaded screw 10 (hollow) have the same helical direction and have different leads , that is, the first threaded screw (lead P1) and the second threaded screw (lead P2), and the output of the displacement is realized by using the relative lead difference between the first threaded screw and the second threaded screw. The first threaded screw 9 is connected to the mirror 16 through the rolling spline shaft 12 , and the first screw nut 8 matched with the first threaded screw ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More