

AGV navigation positioning method based on landmark identification
A navigation positioning and landmark technology, applied in the field of AGV navigation and positioning, AGV navigation and positioning based on landmark recognition, can solve the problems of lack of visual landmark path planning methods, lack of flexible navigation and positioning application methods, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0059] The present invention will be further described below in conjunction with the drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, and are not intended to limit the present invention.
[0060] Such as Figure 1-3 shown.
[0061] An AGV navigation and positioning method based on landmark recognition, comprising the following steps: 1.1 A path planning method based on visual landmark calculation and 1.2 A visual landmark-based precise positioning and attitude adjustment calculation method.
[0062] The path planning method based on visual landmark solution includes the following content:
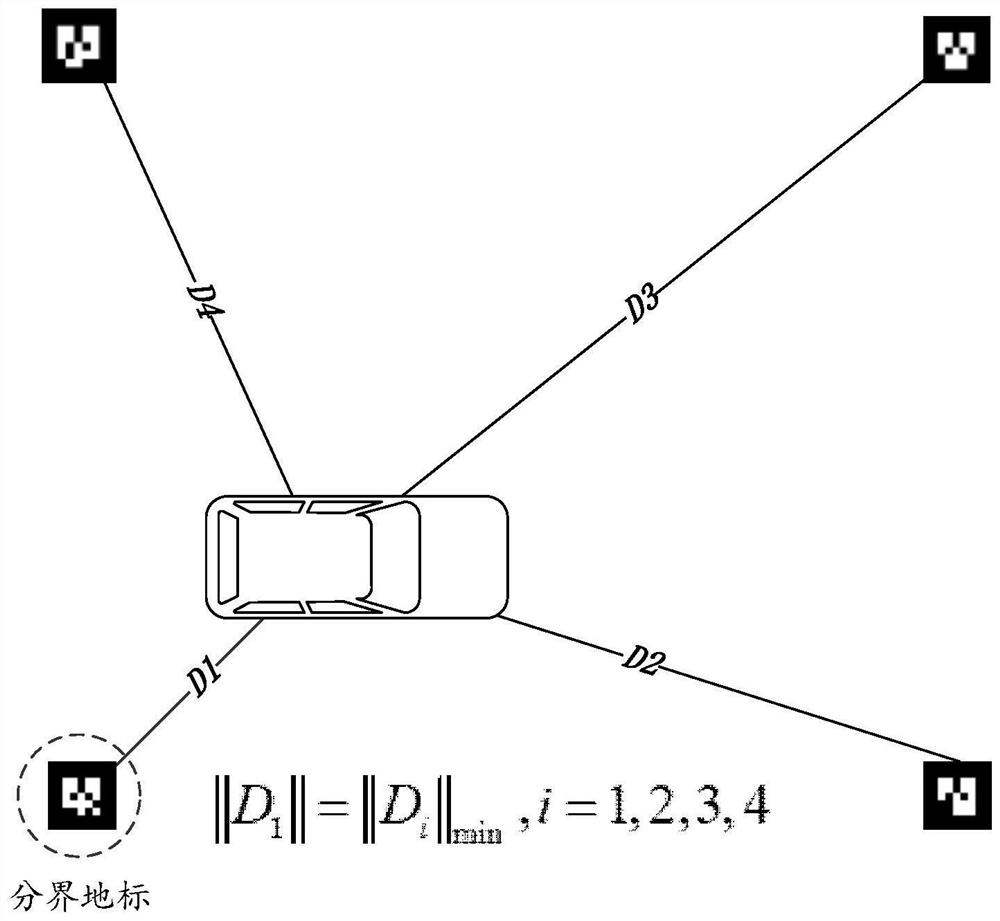
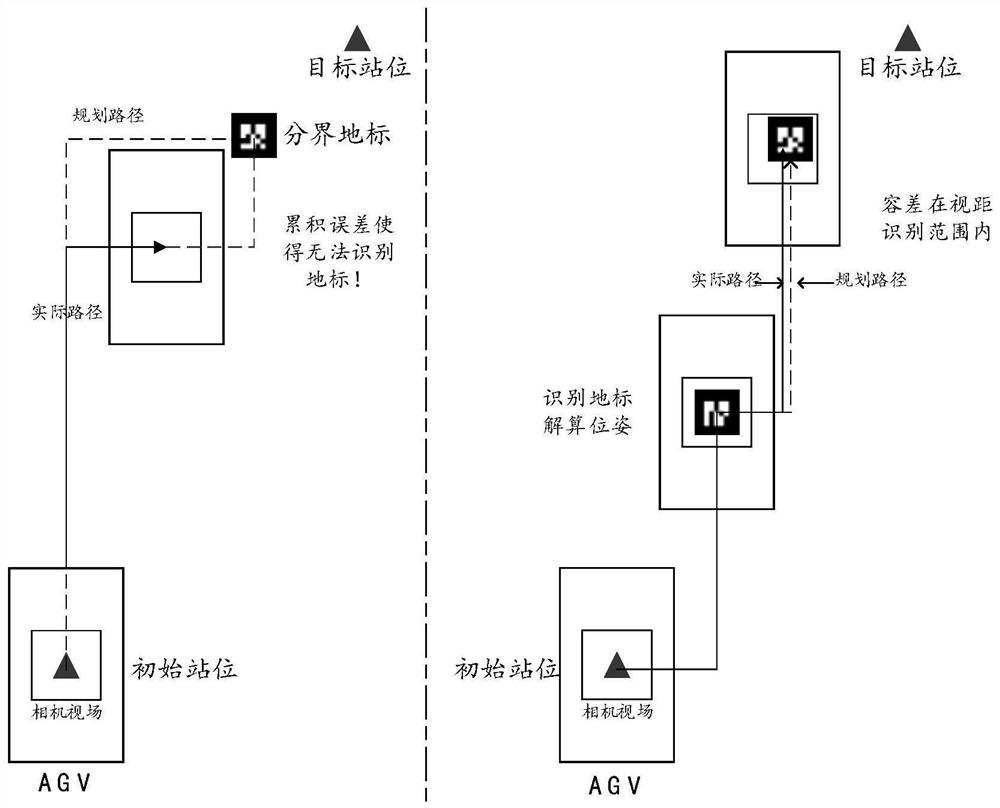
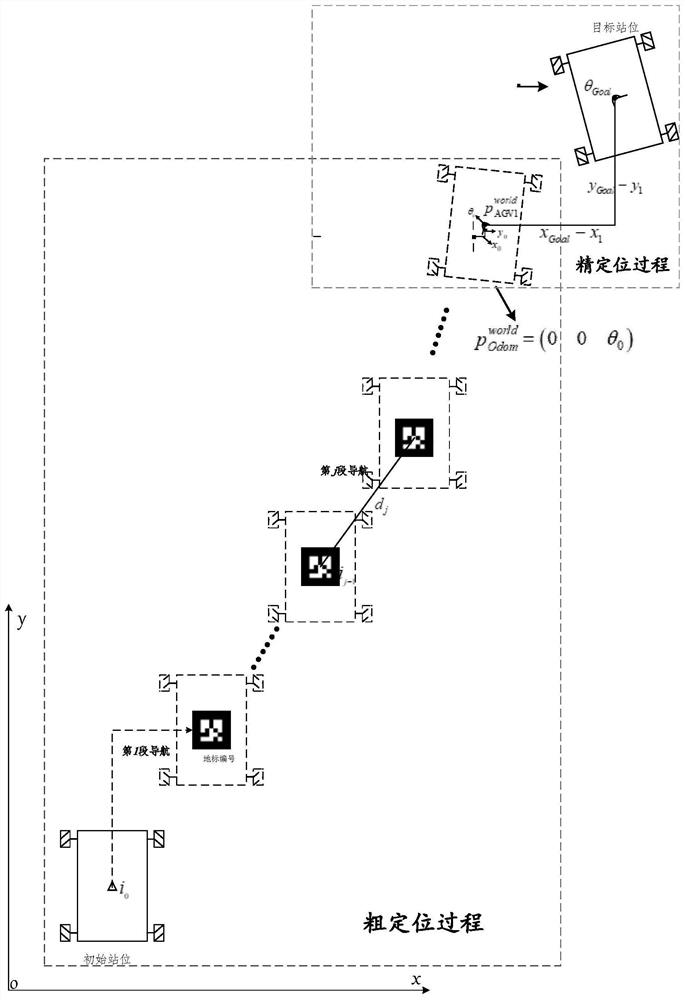
[0063] (1) The boundary between fine positioning and coarse positioning based on landmark calculation.
[0064] The path planning process is divided into fine positioning and coarse positioning stages: the rough positioning and navigation process is the process of navigating from the initial stat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More