Unmanned vehicle control method, device, electronic device and storage medium
A control method and unmanned vehicle technology, applied in the field of devices, electronic equipment and storage media, and unmanned vehicle control methods, can solve the problems of poor control effect, single control factor, high labor cost, etc., and achieve the effect of accurate driving control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
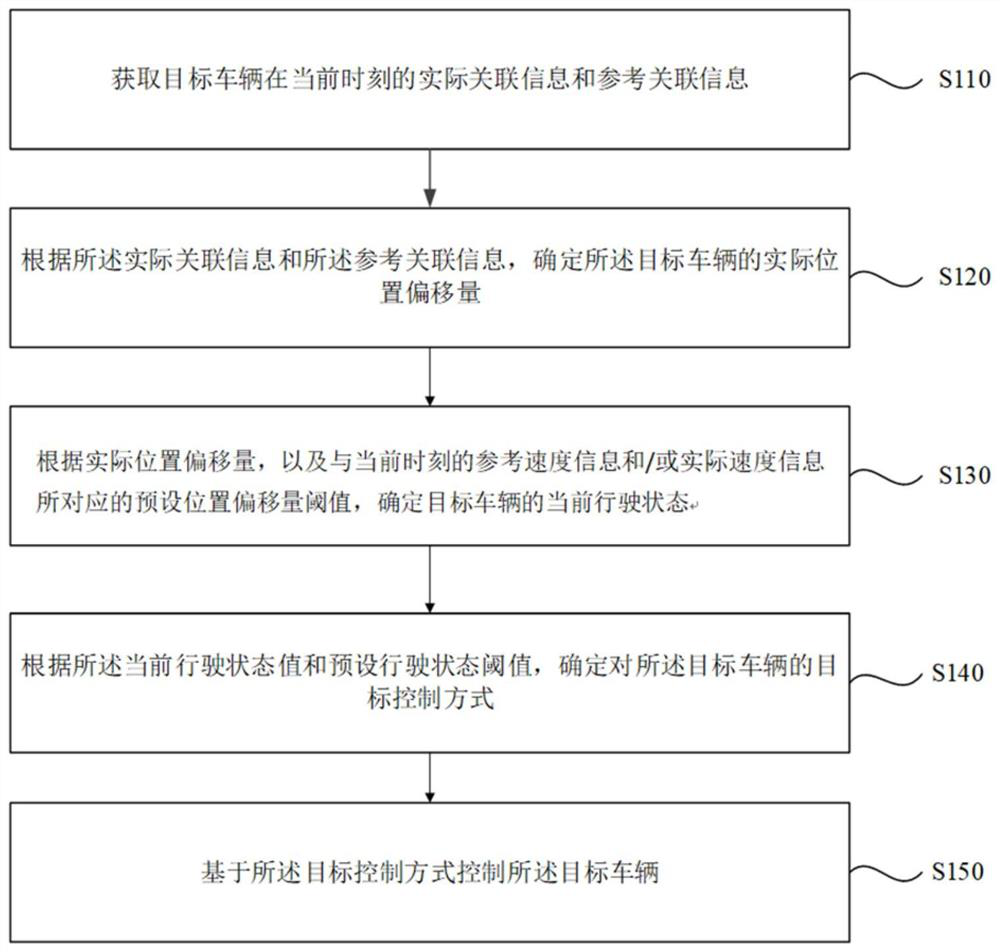
[0032] figure 1 This is a schematic flowchart of a method for controlling an unmanned vehicle provided by the first embodiment of the present invention. This embodiment can be applied to determine the driving condition of the unmanned vehicle at each discrete time point, and then determine whether to control the unmanned vehicle after the current discrete time point. In the case of the specific control method of people and vehicles, the method can be executed by an unmanned vehicle control device, which can be implemented in the form of software and / or hardware, the hardware can be electronic equipment, and the electronic equipment can be mobile terminals, PC terminals Wait.
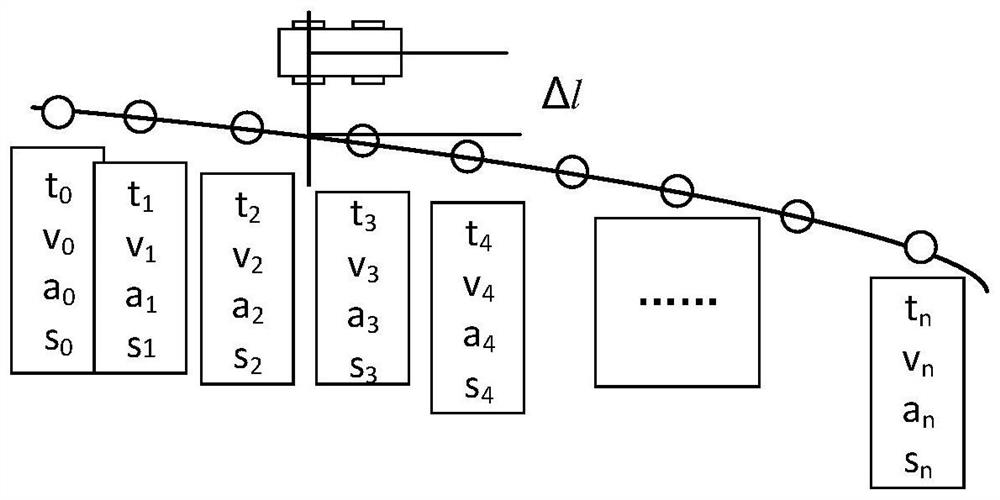
[0033] Before introducing the technical solution of this embodiment, an exemplary description of an application scenario is given first.
[0034] Before the unmanned vehicle (unmanned vehicle) travels, a corresponding driving path can be planned for the unmanned vehicle according to the starting point, ...
Embodiment 2
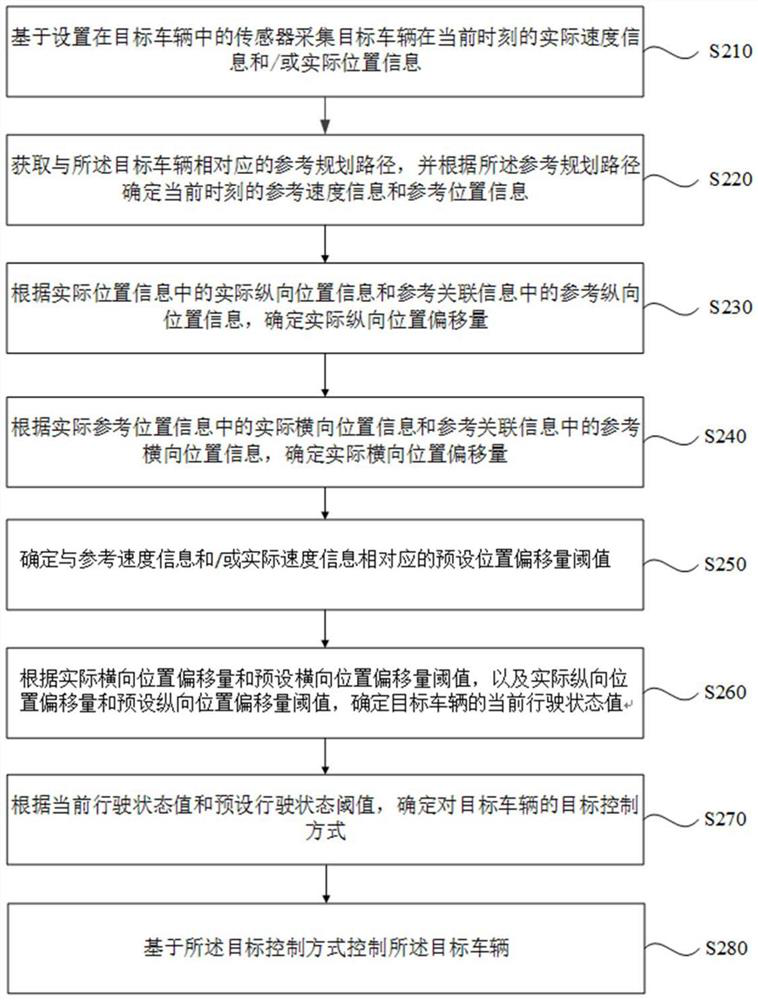
[0056] image 3 This is a schematic flowchart of an unmanned vehicle control method provided in Embodiment 2 of the present invention. On the basis of the foregoing embodiments, the actual association information and reference association information of the target vehicle at the current moment can be obtained based on the settings on the vehicle. It is determined by the data collection state, and further, after determining the associated information of the target vehicle at the current moment, the actual lateral position offset and the actual longitudinal position offset in the actual position offset can also be determined according to the associated information, and then Based on the determined horizontal and vertical position offsets, the target control mode for the target vehicle is obtained. The specific implementation can refer to the technical solution of this embodiment. Wherein, the technical terms that are the same as or corresponding to the above embodiments are not...
Embodiment 3
[0092] Figure 4 This is a schematic flowchart of a method for controlling an unmanned vehicle provided by the third embodiment of the present invention. On the basis of the foregoing embodiment, the target control of the target vehicle after the current moment is determined according to the current driving state value and the preset driving state threshold value. For the method, please refer to the technical solution of this embodiment. Wherein, the technical terms that are the same as or corresponding to the above embodiments are not repeated here.
[0093] like Figure 4 Said, the method includes:
[0094] S310: Acquire actual association information and reference association information of the target vehicle at the current moment.
[0095] S320. Determine the actual position offset of the target vehicle according to the actual association information and the reference association information.
[0096] S330. Determine the current driving state value of the target vehicl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com