

Three-dimensional point cloud reconstruction method based on deep learning
A 3D point cloud and deep learning technology, which is applied in the field of 3D point cloud reconstruction based on deep learning, can solve the problems of rough 3D point cloud and sparseness, and achieve the effect of alleviating cross-view differences.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] In order to make the purpose, technical solution and advantages of the present invention clearer, the implementation manners of the present invention will be further described in detail below.
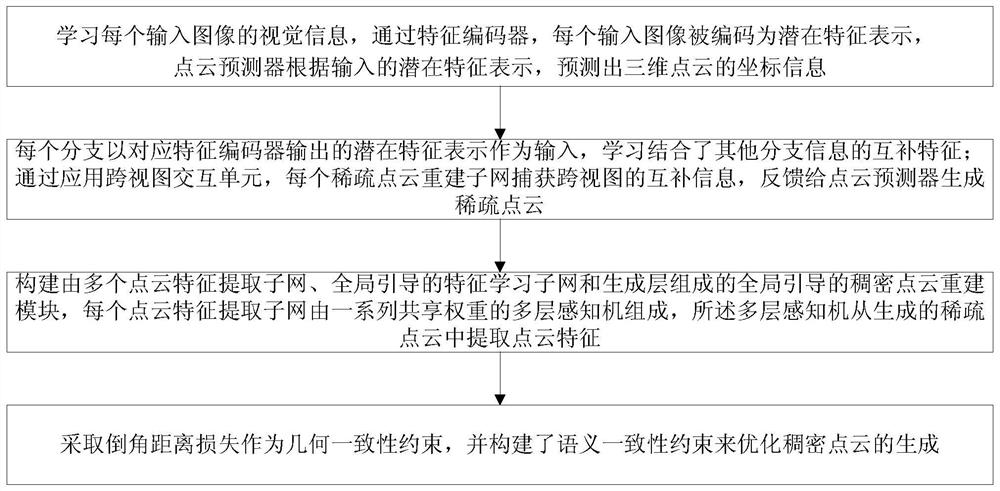
[0033] The embodiment of the present invention provides a method for 3D point cloud reconstruction based on deep learning, see figure 1 , the method includes the following steps:
[0034] 1. Build a sparse point cloud reconstruction module
[0035] First, a sparse point cloud reconstruction module is constructed, which consists of multiple identical sparse point cloud reconstruction subnetworks. Each sparse point cloud reconstruction subnetwork consists of: a feature encoder and a point cloud predictor.
[0036] (1) Feature encoder: A two-dimensional image feature extraction network VGG16 based on deep learning is used. The input of the VGG16 network is a picture taken or projected from a certain perspective of a three-dimensional object. The network is used to learn visual i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More