

An Adaptive Dynamic Sliding Mode Autonomous Vehicle Path Tracking Control Method Considering Input Saturation
A path tracking and tracking control technology, applied in vehicle position/route/height control, non-electric variable control, two-dimensional position/channel control, etc., can solve the problems of uncertain parameters, external unknown interference, etc., to ensure driving The effect of stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0079] see Figure 1 to Figure 3 Shown:
[0080] The adaptive dynamic sliding mode self-driving vehicle path tracking control method considering input saturation provided by the present invention comprises the following steps:
[0081] Step 1. Establish an integrated path tracking model that considers both kinematics and two-degree-of-freedom vehicle dynamics.
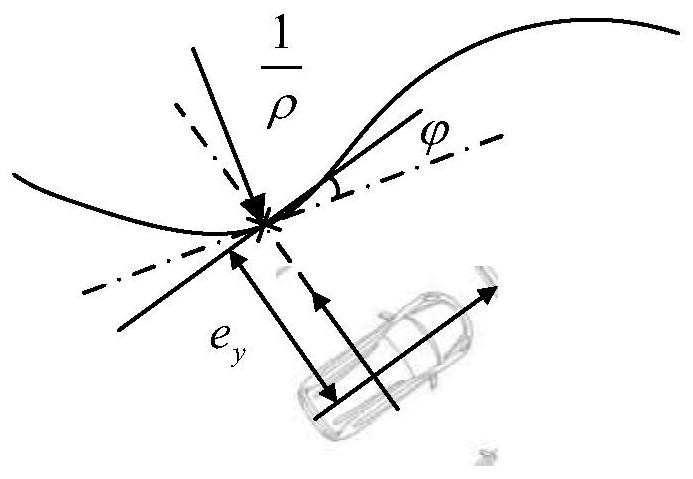
[0082] Such as figure 1 The vehicle kinematics-based path-following error model shown is as follows:
[0083]
[0084] where e y is the distance between the center of mass of the vehicle and the corresponding point on the desired path on the y-axis of the vehicle center of mass coordinate system; v x is the longitudinal velocity of the vehicle; v y is the lateral speed of the vehicle; is the difference between the heading angle of the vehicle and the corresponding point on the desired path; ρ is the curvature of the corresponding point on the desired path; r is the yaw rate of the vehicle;
[0085] The dynam...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More