

A speed following adaptive robust control method for electric autonomous vehicles
An adaptive robust and automatic driving technology, applied in the direction of adaptive control, general control system, control/adjustment system, etc., can solve problems such as parameter uncertainty and affecting vehicle tracking performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
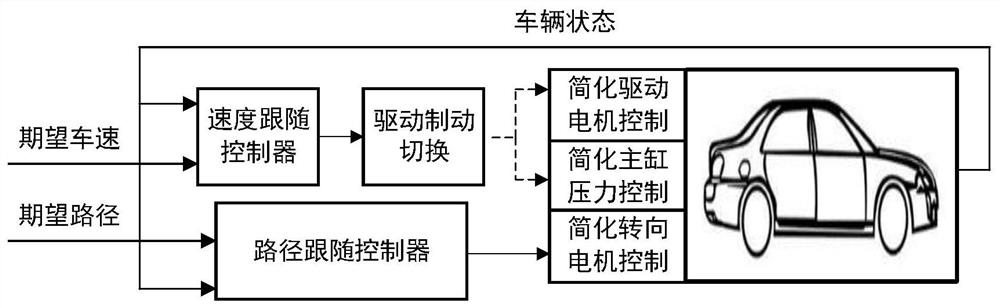
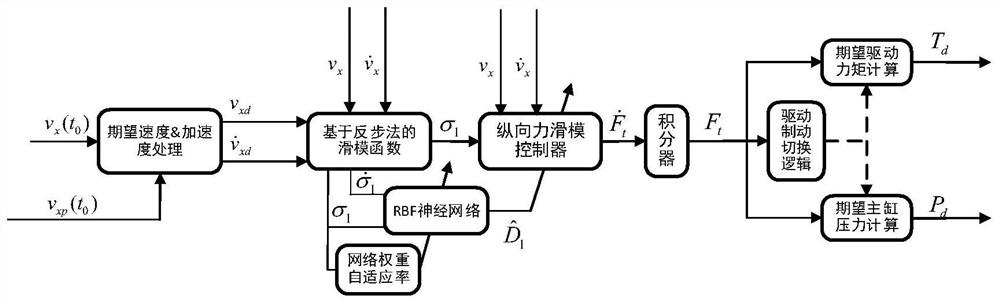
[0072] see Figure 1 to Figure 2 Shown:
[0073] A strong and robust vehicle speed following control method for an electric four-wheel-drive automatic driving vehicle proposed by the present invention specifically includes the following steps:
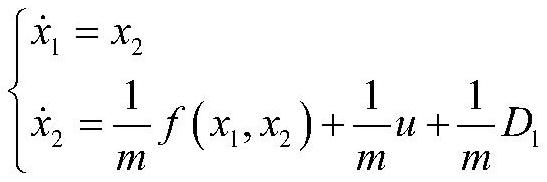
[0074] Step 1: Establishing a second-order longitudinal dynamics model of the vehicle including parameter uncertainties and external disturbance items.
[0075] Generally, the longitudinal dynamic model of the vehicle ignores the influence of air resistance and slope resistance, etc., but the method of the present invention focuses on the speed tracking control of the vehicle under the condition of uncertain parameters and certain external disturbances. Item cannot be ignored. Therefore, a complete longitudinal dynamic model is adopted, as shown in the following formula:
[0076]
[0077] In the formula, M is the total mass of the vehicle, which includes the known vehicle curb weight m and the unknown additional carrying mass Δm ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More