

A Disturbance Suppression Method for Controlling Moment Gyroscope Frame System Based on Discrete Nonlinear Cascaded Extended State Observer
A technology for controlling moment gyroscope and expansion state, applied in general control system, control/adjustment system, adaptive control, etc., can solve the problem of difficult configuration of ESO parameters, lower accuracy of angular rate of frame system, and worse estimation effect of observer than nonlinear CESO and other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach
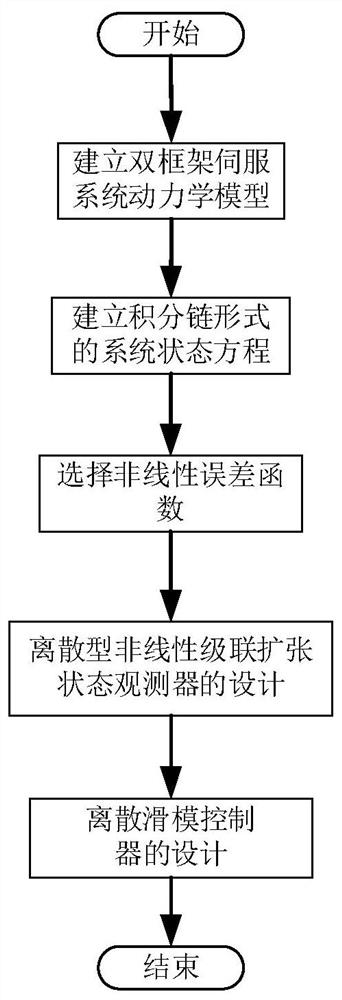
[0065] (1) Establish a dynamic model of the dual frame servo system
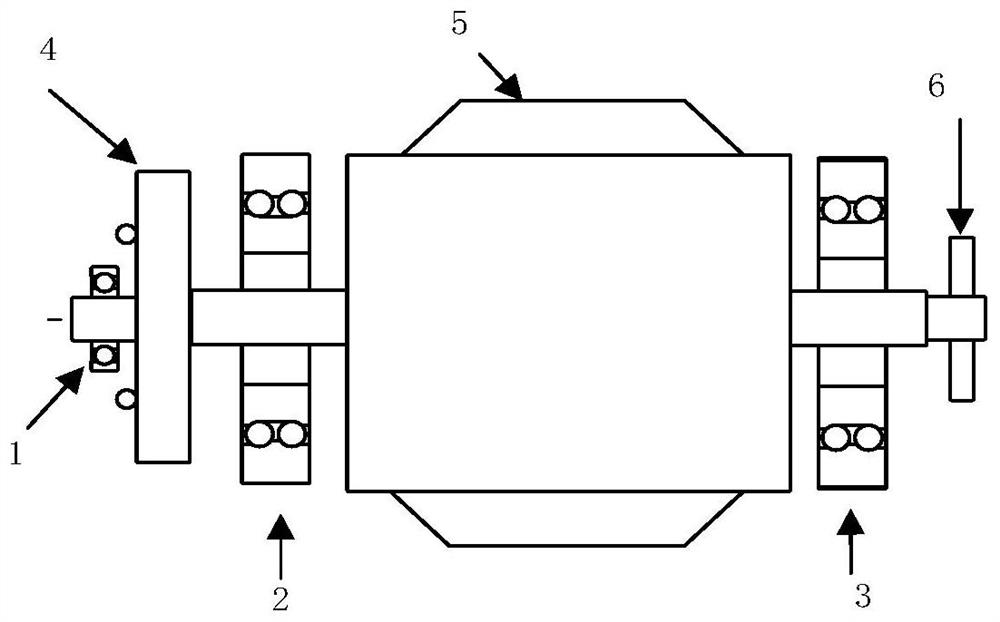
[0066] From figure 2 As can be seen from the system structure shown, DGMSCMG is composed of an inner and outer frame system and a high-speed rotor system. The stator part of the outer frame is fixed on the base. In addition, two resolvers are used to measure the angular position of the inner and outer frames, and the angular velocity is calculated from the angular position.
[0067] The dynamic equation and torque balance equation of the inner and outer frame system can be written as:
[0068]
[0069] Where θ x And θ y Are the corner positions of the inner and outer frames, K x And K y Are the torque coefficient, J x And J y Is the equivalent moment of inertia of the inner and outer frames, F x And F y Is the unmodeled dynamics of the internal and external framework, f x And f y Is the nonlinear friction torque, T x And T y Is the output torque of the frame motor, H z Is the angular momentum of the high-speed rot...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More