

Room segmentation method based on internal circles and adjacency graph
A technology of adjacency graph and room, applied in the field of mobile robot and laser measurement, which can solve the problems of expressing indoor space semantics and insufficient topological structure.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
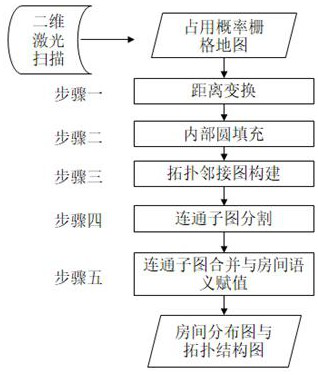
[0069] The room segmentation method based on internal circle and adjacency graph realized by the present invention comprises the following steps:
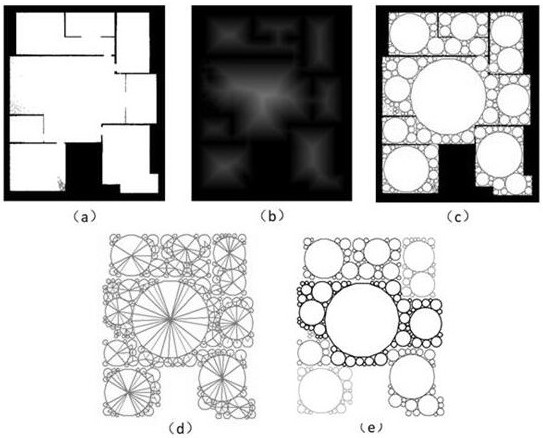
[0070] Step 1: Use the two-dimensional occupancy probability grid map obtained by two-dimensional laser scanning (such as image 3 (a)) Carry out distance transformation and calculate the distance value of the nearest neighbor occupancy point of each pixel (such as image 3 (b));
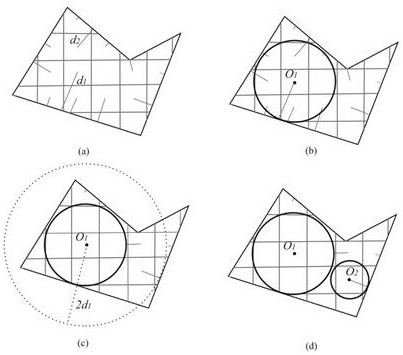
[0071] Step 2: fill the inner circle, such as image 3 As shown in (c), use the inner circle to fill the indoor free space, and construct the inner circle approximation of the indoor free space;
[0072] Step 3: Topological adjacency graph construction, such as image 3 As shown in (d), this method uses weighted undirected graphs to construct the association relationship between internal circles; according to the adjacency relationship between internal circles, the undirected graph expression of internal circles is constructed, and each node of the un...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More