

An energy-saving underwater path planning method based on particle swarm optimization with re-excitation mechanism
A particle swarm algorithm and path planning technology, applied in control/regulation systems, altitude or depth control, non-electric variable control, etc. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
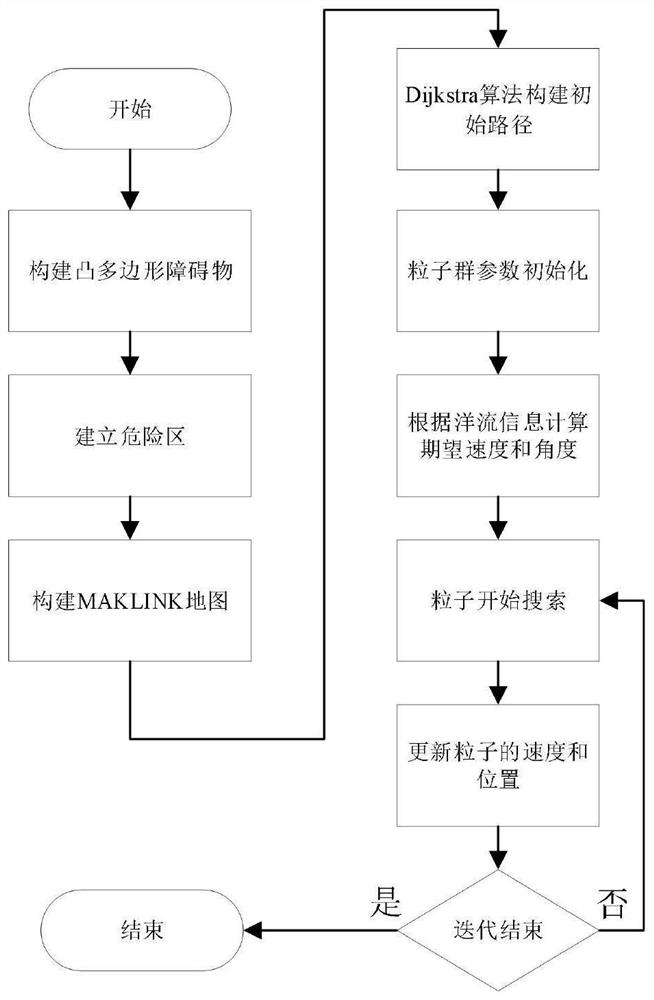
[0059] like figure 1 As shown, the present invention is an energy-saving underwater path planning method based on the particle swarm algorithm of the re-excitation mechanism, using Graham algorithm and MAKLINK graph theory for environmental modeling, using Dijkstra algorithm for path suboptimization, and using improved particle swarm algorithm for final path optimization. Optimization, and in order to reduce the number of robot corners, use Bezier curves to smooth the path.
[0060] The underwater path planning method based on the particle swarm algorithm of the re-excitation mechanism of the present invention comprises the following steps:
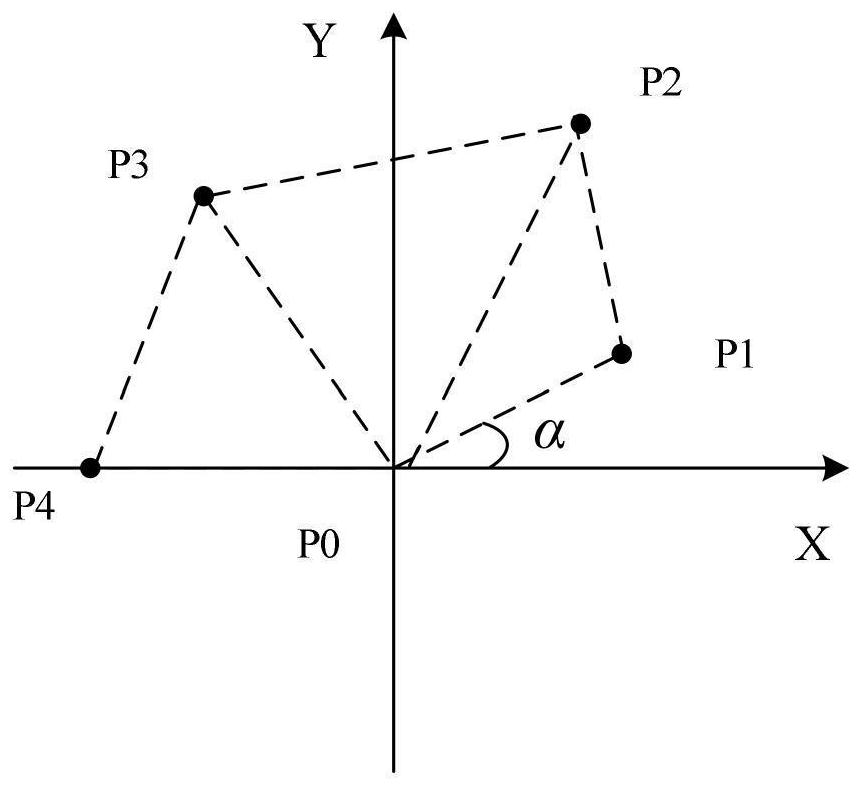
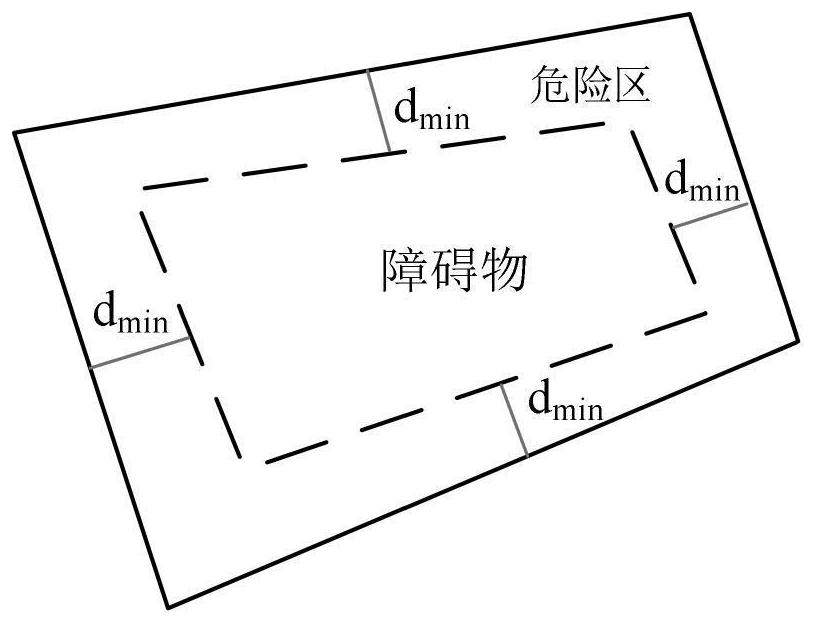
[0061] Step (1), build a convex polygon obstacle model according to the Graham algorithm, and expand the set distance to establish a danger zone. The specific process is as follows:
[0062] Step (1.1), as in figure 2 As shown, a random number of points P are designed on the two-dimensional coordinate system 0 , P 1 , P 2 , P 3 and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More