

Energy-saving underwater path planning method based on reexcitation mechanism particle swarm optimization
A particle swarm algorithm and path planning technology, applied in control/regulation systems, non-electric variable control, height or depth control, etc., and can solve problems such as being easily affected by ocean currents
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
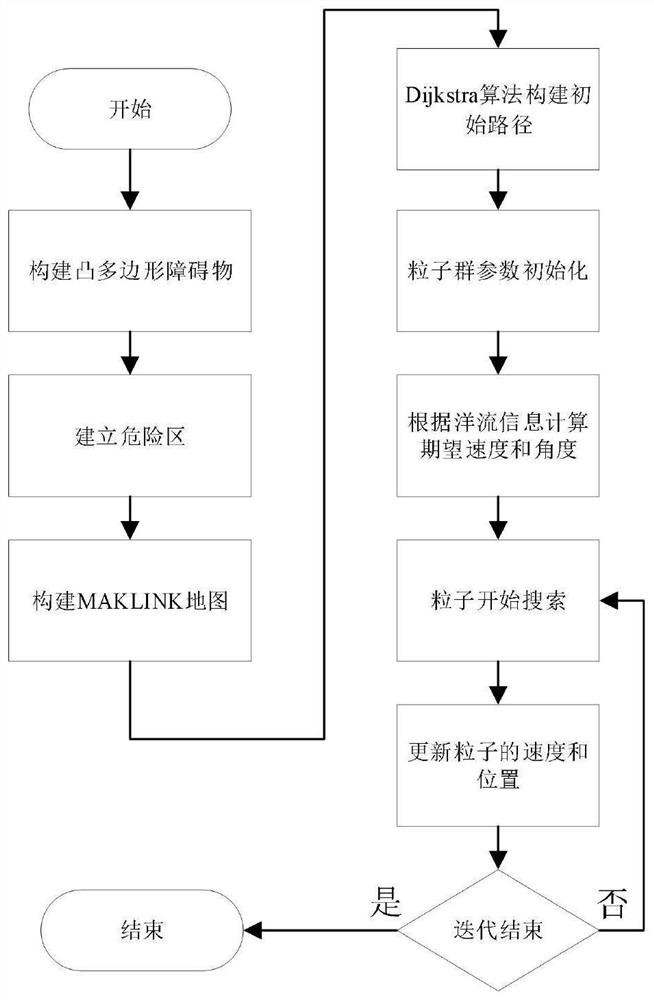
[0059] Such as figure 1 As shown, the present invention is based on the energy-saving underwater path planning method of the re-excitation mechanism particle swarm algorithm, uses the Graham algorithm and the MAKLINK graph theory to carry out environmental modeling, uses the Dijkstra algorithm to carry out path sub-optimization, and uses the improved particle swarm algorithm to carry out path finalization. Optimization, and in order to reduce the number of robot corners, use Bezier curves to smooth the path.
[0060] The underwater path planning method based on the particle swarm algorithm of the re-excitation mechanism of the present invention comprises the following steps:
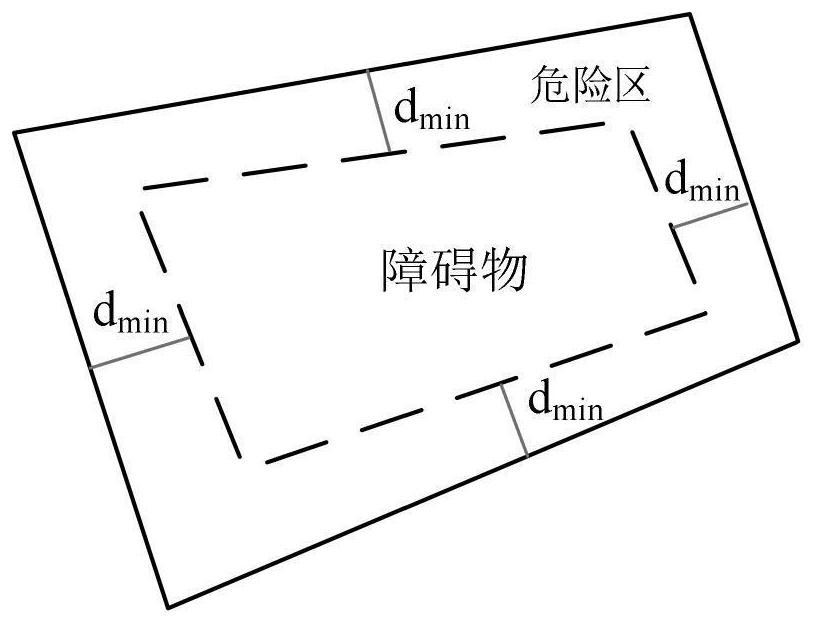
[0061] In step (1), a convex polygonal obstacle model is established according to the Graham algorithm, and a set distance is expanded outward to establish a danger zone. The specific process is as follows:
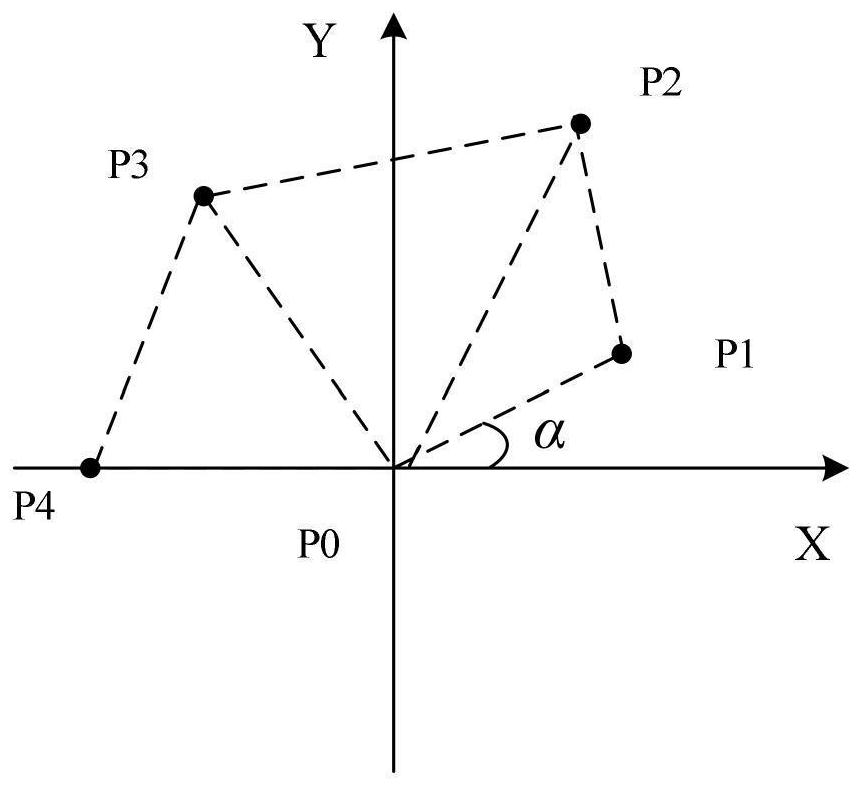
[0062] Step (1.1), such as figure 2 As shown, design a random number of points P on the two-d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More