

Pose estimation method of robot system based on two-dimensional code correction
A robot system and pose estimation technology, which is applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as the loss of precision of the robot arm, the inability of the robot system to perform accurate positioning, and the deviation of the horizontal movement of the robot arm.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] The present invention will be described in detail below with reference to specific embodiments.
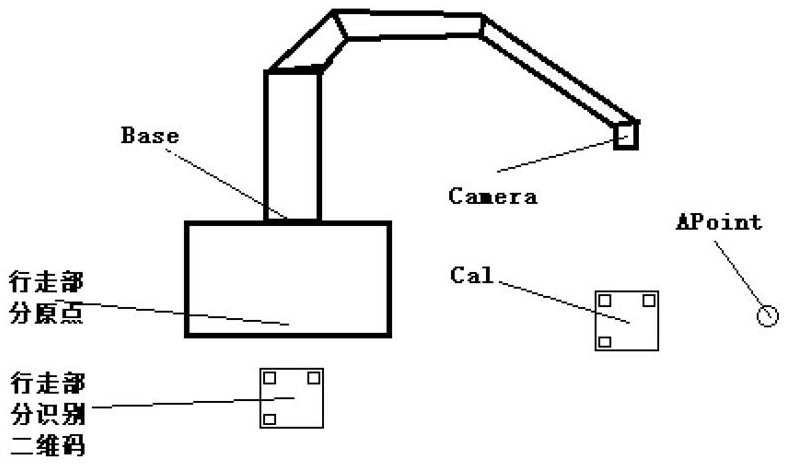
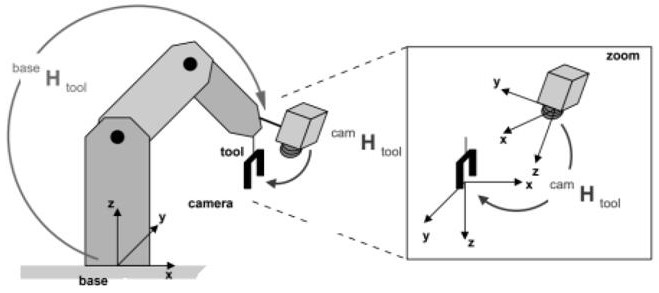
[0050] The invention relates to a pose estimation method based on a two-dimensional code correction robot system. The robot system has a robot walking part, a robot control part, a robot arm part and a robot vision part. It should be pointed out that the present invention is applicable to all robot systems with machine vision, and the robot systems described below are only to illustrate the work flow and working principle of the present invention. The walking part of the robot is an AGV vehicle, which has the ability to move in the horizontal direction and rotate in the horizontal direction. The robot arm part is a 6-axis robot arm, and the robot arm has multiple degrees of freedom. The robot vision part is a visual device such as an industrial camera or a binocular camera, which is installed at the end of the robot arm and is fixed relative to the end, and adopts the eye-...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More