

SLAM-based intelligent control system for robot
A technology of robot intelligence and control system, which is applied in the direction of program control of manipulators, manipulators, manufacturing tools, etc., can solve problems such as poor obstacle avoidance ability, poor robot robustness, and poor robot positioning accuracy, and achieve the effect of enhancing robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
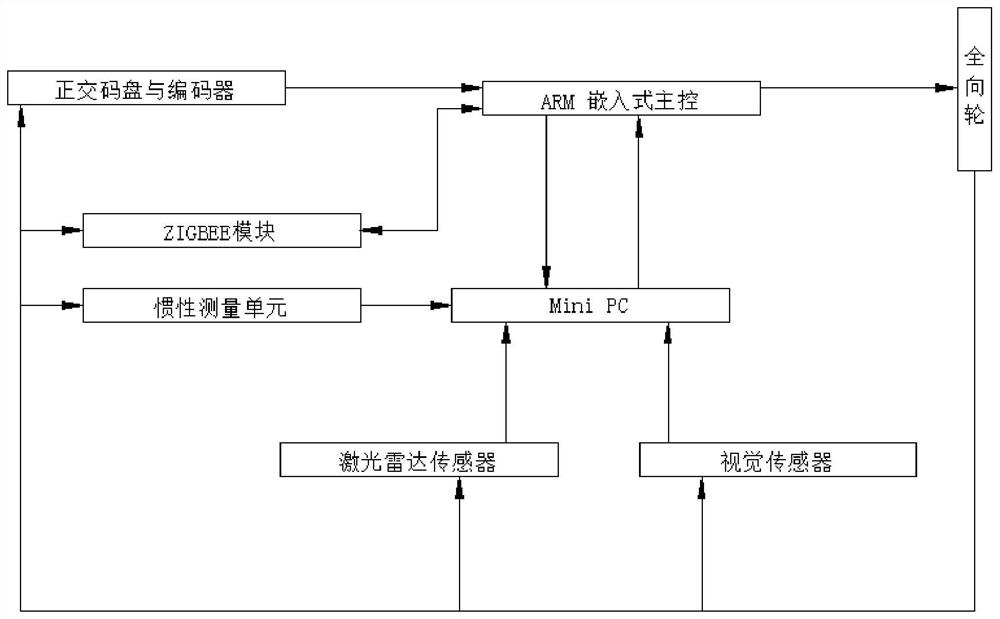
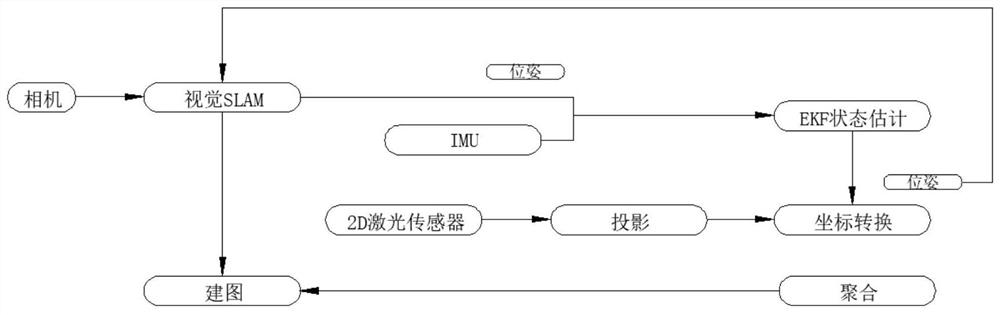
[0025] see Figure 1-2 , the present invention provides a technical solution: a robot intelligent control system based on SLAM technology, including: MiniPC, ARM embedded main control, laser radar sensor, vision sensor, omnidirectional wheel, inertial measurement unit, ZIGBEE module, orthogonal Code disc and encoder, camera and 2D laser sensor; ARM embedded main control is interactively connected with ZIGBEE module, ARM embedded main control is interactively connected with MiniPC, omnidirectional wheel is respectively connected with laser radar sensor, ZIGBEE module, inertial measurement unit, positive The cross-code disc is connected with the encoder and the visual sensor, the lidar sensor and the visual sensor are connected with the MiniPC, the inertial measurement unit is connected with the MiniPC, the orthogonal code disc is connected with the encoder and the ARM embedded main control, and the ARM embedded main control is connected with the full to the wheel connection;
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More