

Semantic mapping and positioning method based on priori laser point cloud and depth map fusion
A technology of laser point cloud and semantic mapping, applied in 3D image processing, image enhancement, image analysis and other directions, can solve the problem that the sensor cannot meet the robustness and real-time performance, prevent the widespread use of localization and mapping technology, point cloud Frame matching failure and other problems, to achieve the effect of automatic initialization and motion recovery, improved mapping and positioning accuracy, and real-time high-precision operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
[0047] In order to make the above objects, features and advantages of the present invention more comprehensible, the present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
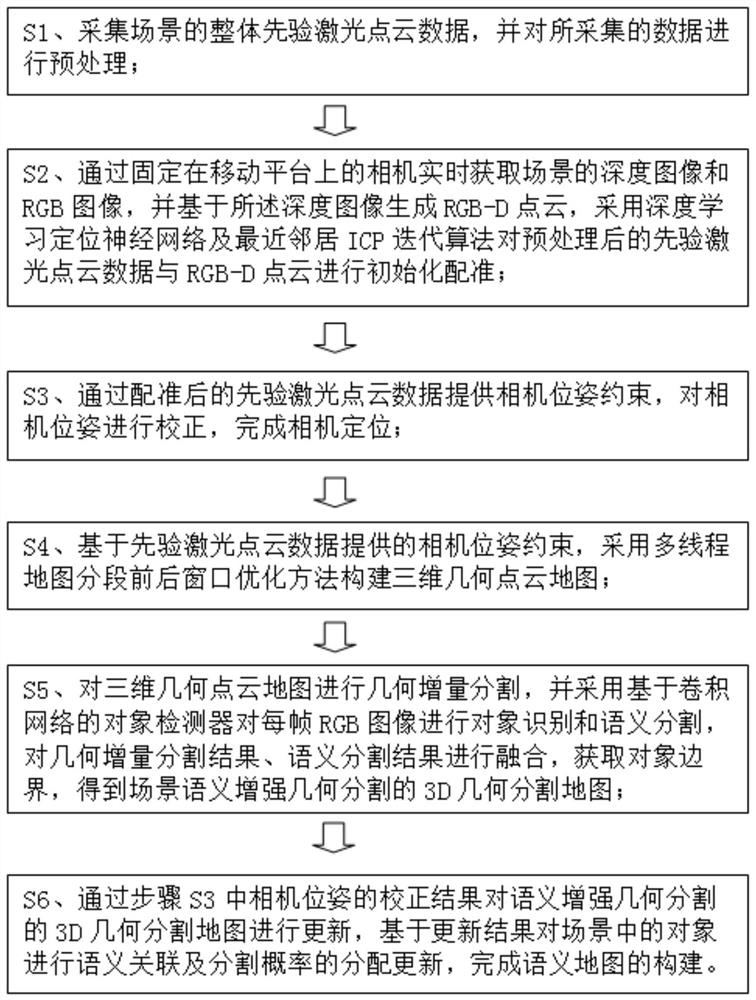
[0048] refer to figure 1 As shown, this embodiment provides a semantic mapping and positioning method based on the fusion of prior laser point cloud and depth map, which specifically includes the following steps: ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More