

Speed limit method, device, electronic equipment and medium for dragging and teaching of mechanical arm joints
A technology of dragging and teaching and manipulator, applied in the field of manipulator, can solve problems such as safety risks, and achieve the effect of preventing dragging speed from being too fast and avoiding safety risks.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0059] Embodiments of the present invention are described in detail below, examples of which are shown in the drawings, wherein the same or similar reference numerals designate the same or similar elements or elements having the same or similar functions throughout. The embodiments described below by referring to the accompanying drawings are exemplary and are intended to explain the present invention, but cannot be construed as limitations to the present invention. Based on the embodiments in the present invention, those skilled in the art do not make creative work premise All other embodiments obtained below all belong to the protection scope of the present invention.
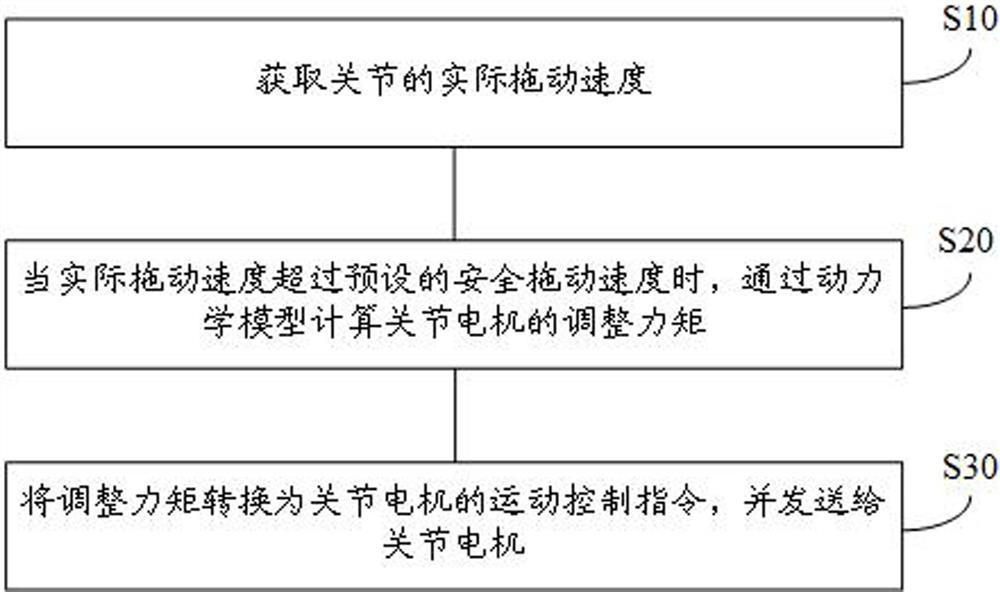
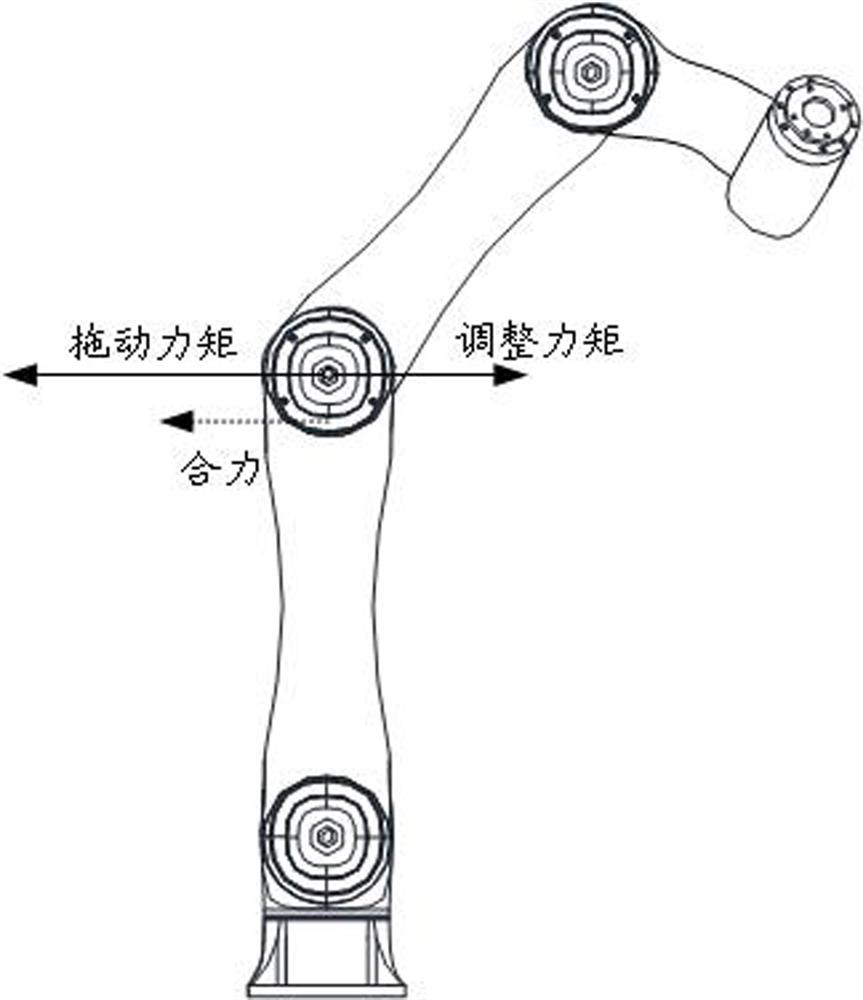
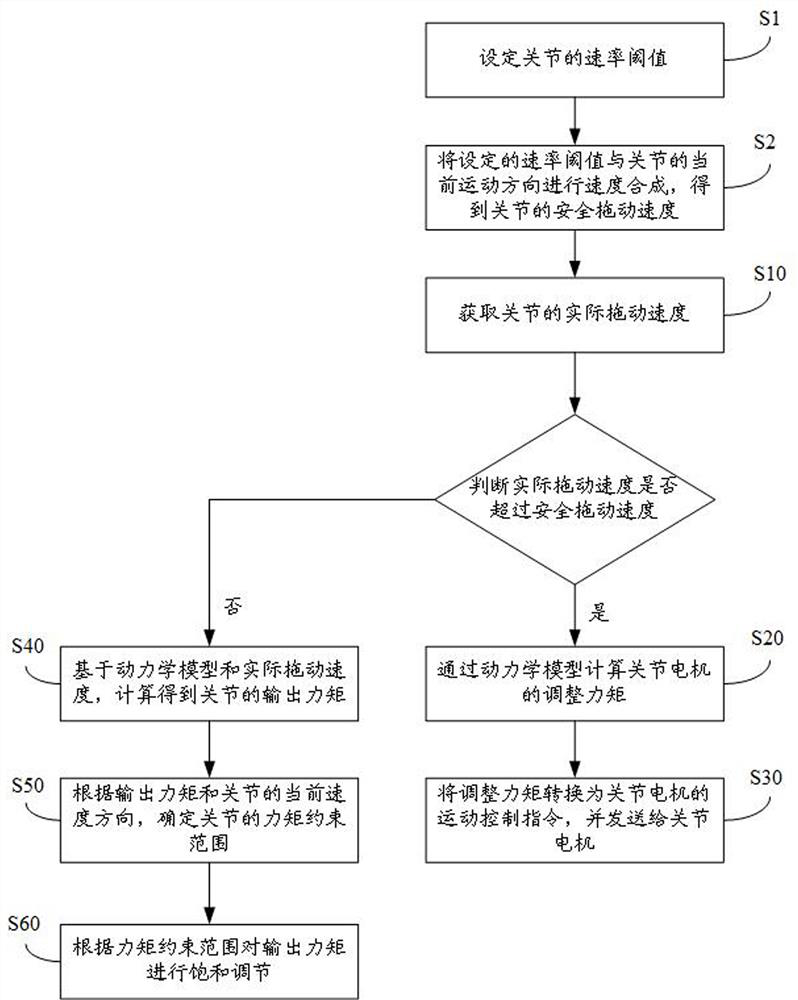
[0060] The dragging and teaching speed limiting method of the joints of the manipulator proposed by the present invention is applicable to multi-joint robots, such as three-axis joint robots, four-axis joint robots, five-axis joint robots, six-axis joint robots and seven-axis joint robots. The multi-joint rob...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More