

Binocular camera intelligent sensing method and device capable of adaptively adjusting base line
An adaptive adjustment, binocular camera technology, applied in the field of visual measurement, can solve problems such as uncertainty, reduce depth uncertainty, and ensure performance.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
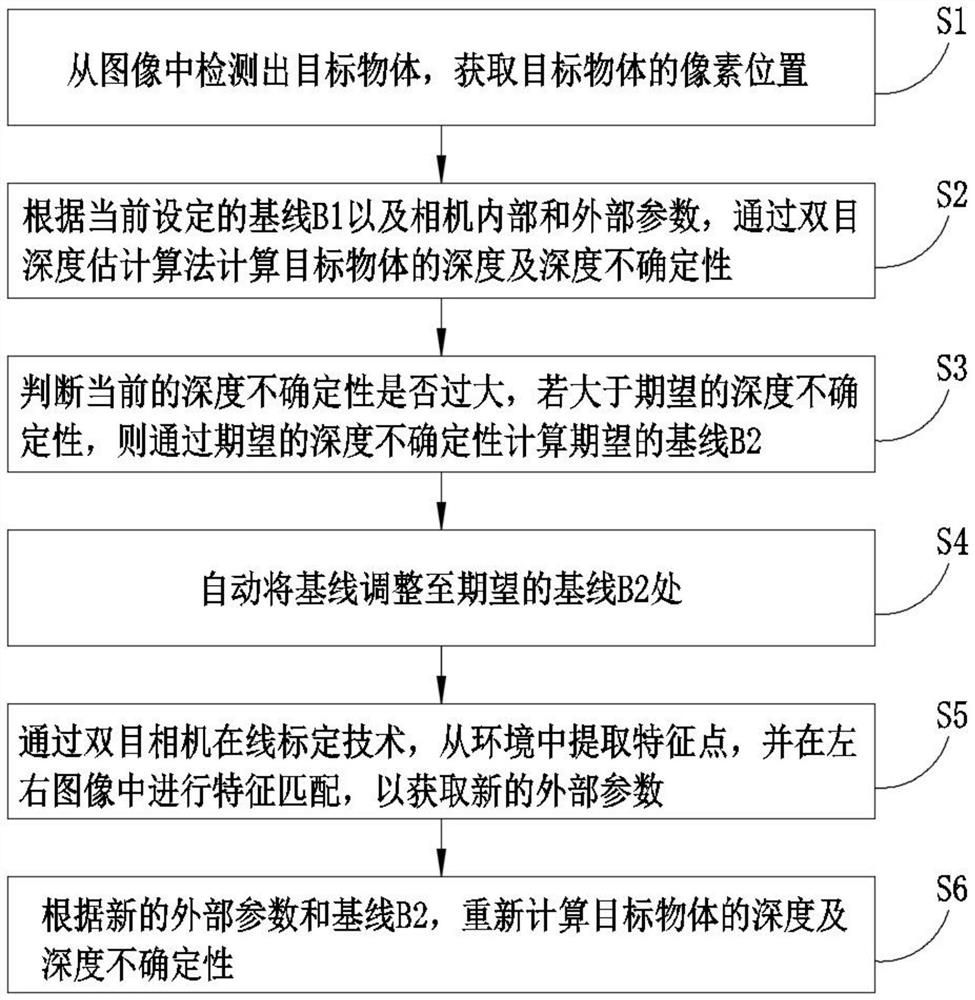
[0048] Please refer to figure 1 , Embodiment 1 of the present invention provides a binocular camera intelligent perception method for baseline adaptive adjustment, and the method includes the following steps:
[0049] Step S1, detecting the target object from the image, and obtaining the pixel position of the target object.
[0050] Specifically, the step S1 includes the following steps: first, determine the target object category to be focused on by the task, for example: trees, pedestrians, cars, etc.; secondly, the left camera in the binocular camera acquires the original image of the current scene , use the internal parameters of the left camera to perform real-time image preprocessing on the original image, for example: cancel the distortion of the original image and correct the original image; finally, input the processed image into the deep convolutional neural network, and output the result from it can determine the pixel position of the target object.
[0051] Step ...
Embodiment 2
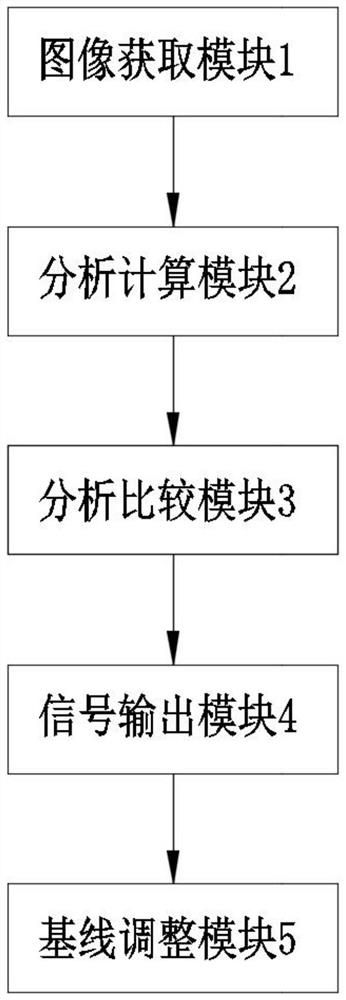
[0070] Please refer to figure 2 , Embodiment 2 of the present invention provides a binocular camera intelligent perception device for baseline adaptive adjustment, and the device includes:
[0071] The image acquisition module 1 is used to acquire the image of the target object and obtain the position of the target object in the image;
[0072] The analysis and calculation module 2 is connected with the image acquisition module 1, and is used to calculate the depth and depth uncertainty of the target object through the binocular depth estimation algorithm according to the currently set baseline B1 and the internal and external parameters of the camera;
[0073] The analysis and comparison module 3 is connected with the analysis and calculation module 2, and is used to judge whether the current depth uncertainty is too large, if it is greater than the expected depth uncertainty, then calculate the expected baseline B2 through the expected depth uncertainty;
[0074] The signa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More