

Manta ray imitating aircraft course control method based on flapping wing amplitude
A technology of aircraft and manta ray, which is applied in the field of heading control of manta ray imitation aircraft based on flapping wing amplitude, can solve the problems of large noise, different intensity, speed water flow, high energy consumption, etc., and achieve improved stability and reliability , reduce the complexity of the model, and reduce the effect of calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0040] Now in conjunction with embodiment, accompanying drawing, the present invention will be further described:
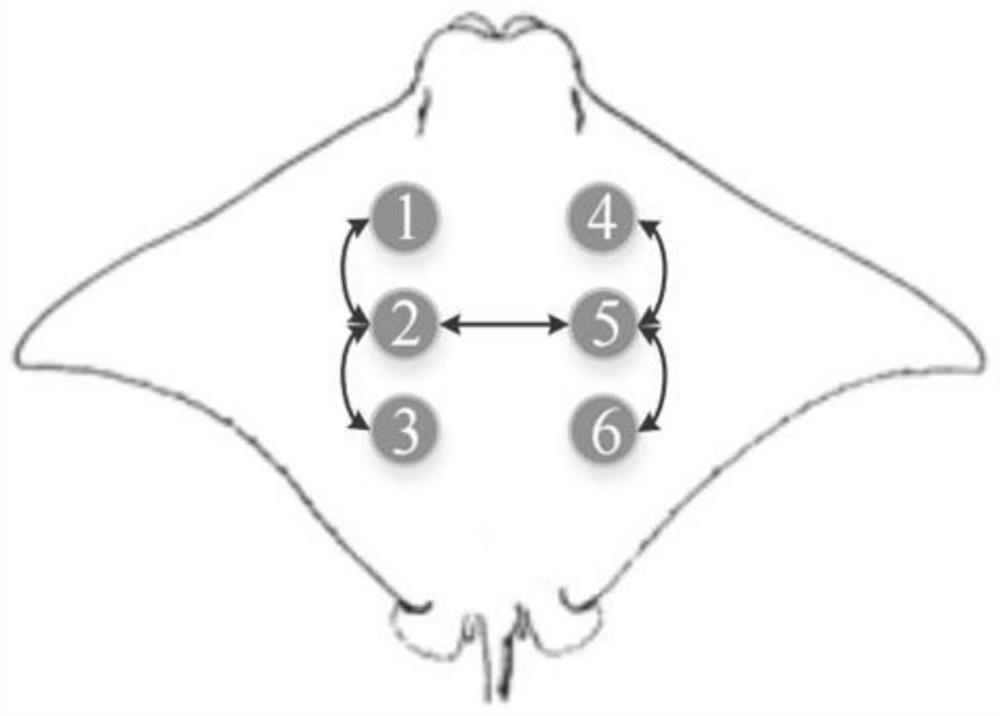
[0041] refer to figure 1 , a heading control method for a manta ray-like vehicle based on flapping wing amplitude, comprising the following steps:
[0042] 1. Obtain the current heading angle δ and the set heading δ sent by the host computer by the attitude sensor d , the difference between the two is input as the deviation e of the heading fuzzy controller, and the differential of the deviation is input as the heading angle change rate ec;
[0043] Calculate heading angle deviation:
[0044] e=δ-δ d (1)
[0045] δ represents the current heading angle, δ d Indicates the desired heading angle
[0046] Calculate the rate of change of heading angle:
[0047]
[0048] δ t Indicates the heading angle at the previous moment, and Δt is the time difference from the previous moment to the current moment.
[0049] 2. Fuzzy parameters. Map the course deviation e...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More