

A method and system for unmanned aerial vehicle patrol track planning
A track planning and unmanned aerial vehicle technology, applied in control/adjustment system, three-dimensional position/course control, vehicle position/route/altitude control, etc., can solve the problems of cumbersome control process of UAV and low efficiency of line inspection , to achieve the effect of shortening inspection time, improving line inspection efficiency and reducing personnel costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
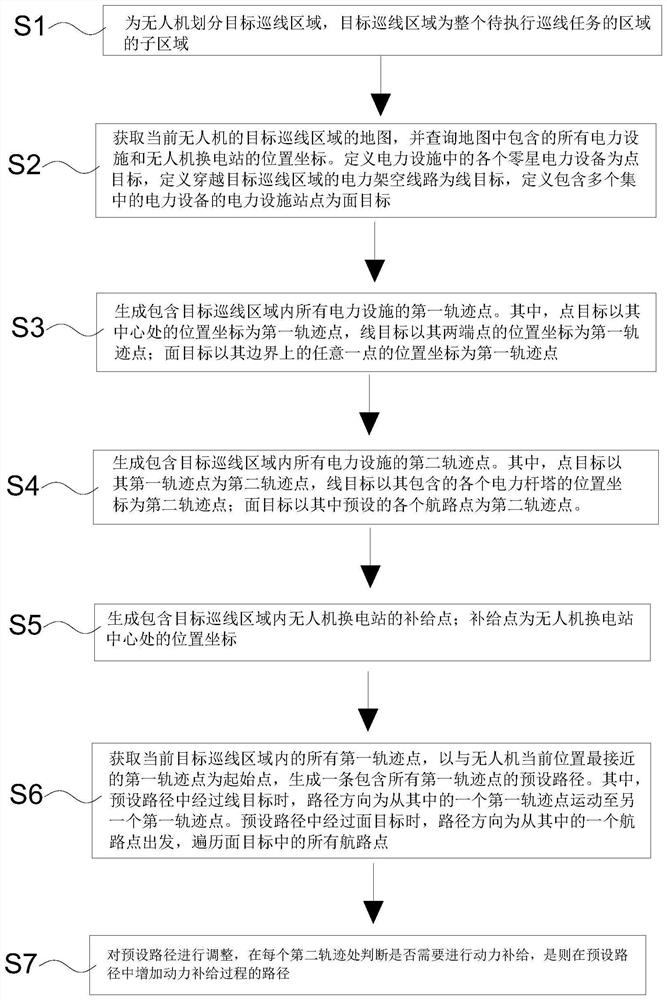
[0070] This embodiment provides a method for planning a UAV patrol line, such as figure 1 As shown, the planning method includes the following steps:
[0071] S1: Divide the target line inspection area for the UAV, and the target line inspection area is a sub-area of the entire area where the line inspection task is to be performed. In a practical application scenario, the entire area where line inspection tasks are to be performed is usually relatively large, and there are a large number of power facilities distributed in the entire area. These power equipment specifically include substations, substations, switchgears, switch cabinets, transformers, overhead medium and high voltage transmission lines, poles or towers installed at intervals in the transmission lines, and so on. These electrical equipment are the facilities that actually need to be inspected in the process of performing line inspection tasks. Considering the limitation of the cruising ability of UAVs during...
Embodiment 2
[0114] This embodiment provides a UAV patrol line track planning system, the planning system uses the UAV patrol line track planning method as described in Embodiment 1 to generate its own flight path; Figure 4 As shown, the planning system includes: a map acquisition module, a first trajectory point generation module, a second trajectory point generation module, a preset path generation module, a battery replacement discrimination module, and a real path control module.
[0115] Among them, the map acquisition module is used to obtain the map of the target line inspection area that the UAV is responsible for patrolling. The map contains the position coordinates of all power facilities and UAV switching stations in the target line inspection area.
[0116] The first trajectory point generation module is used to obtain all the first trajectory points in the target line inspection area; define each sporadic power equipment in the power facility as a point target; define the powe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More