Method and device for determining actual position of object in fisheye camera image
A technology of fisheye camera and actual position, which is applied in the field of image processing, can solve the problems of inaccurate positioning and affecting the accuracy of imaging position, and achieve the effect of simple and efficient method
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0059] As described below, an embodiment of the present invention provides a method for determining the actual position of an object in a fisheye camera image.
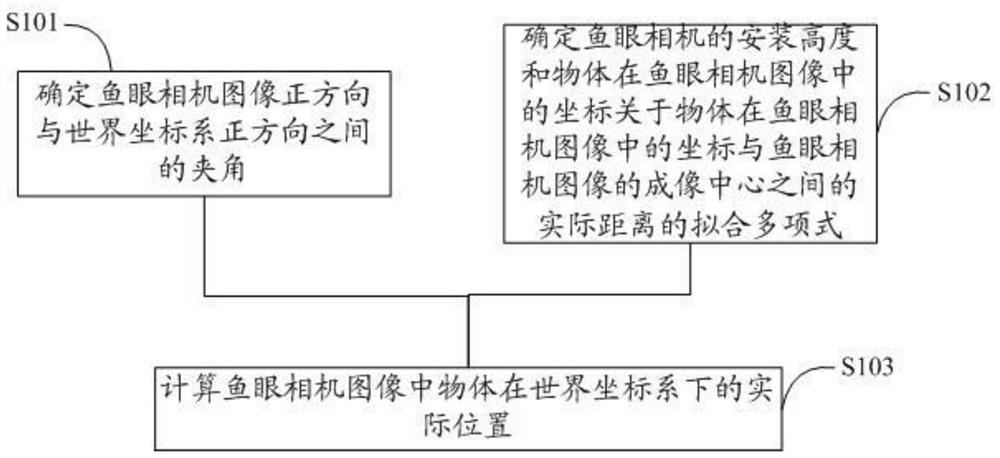
[0060] refer to figure 1 The flow chart of the method for determining the actual position of an object in a fisheye camera image is shown in detail below through specific steps:
[0061] S101. Determine the included angle between the positive direction of the fisheye camera image and the positive direction of the world coordinate system.
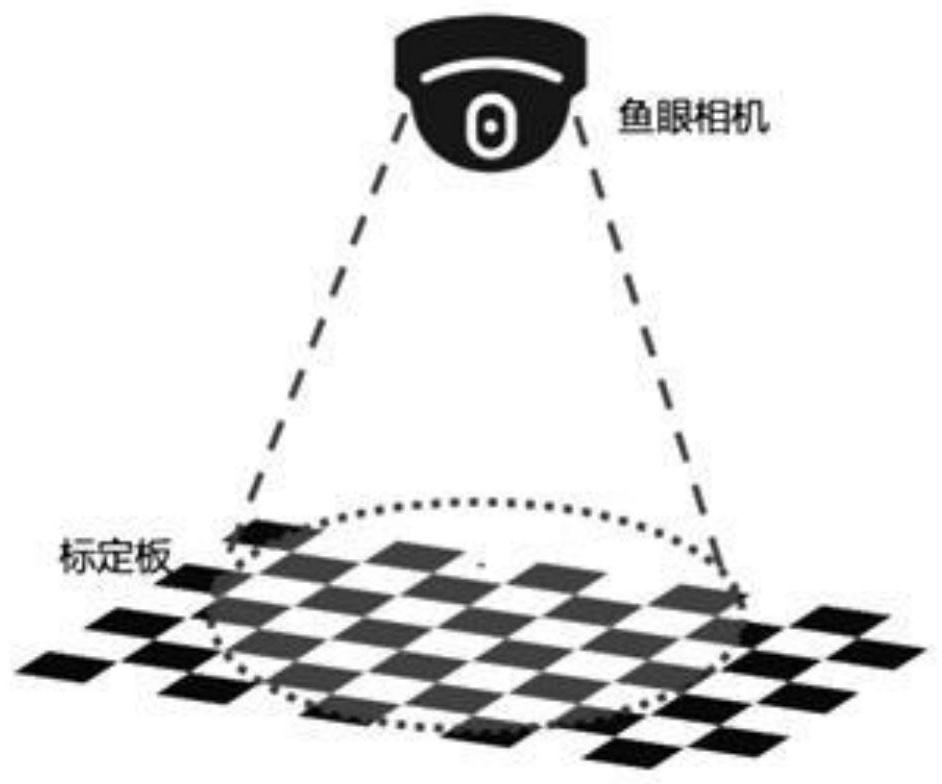
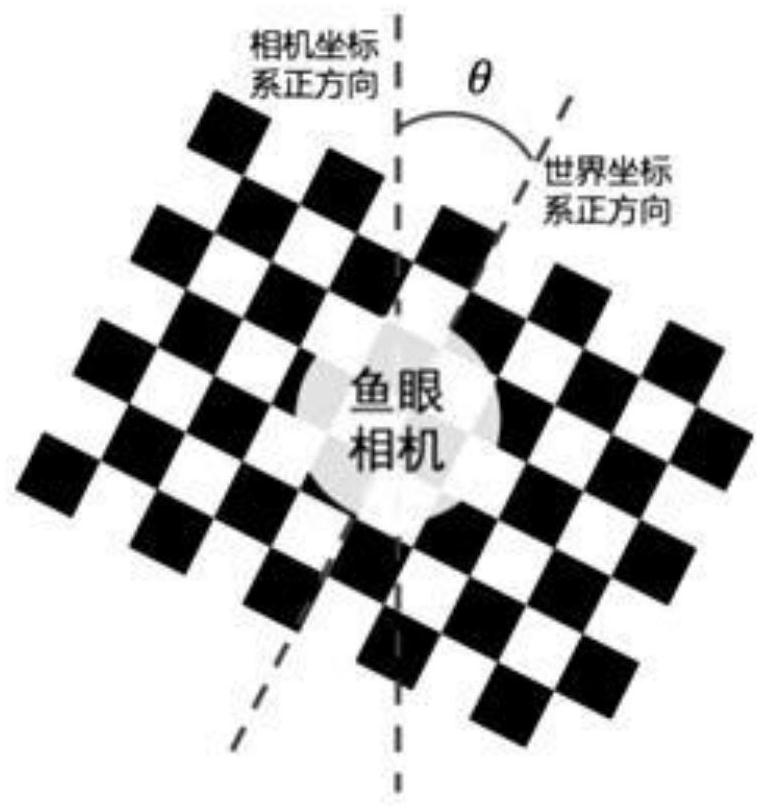
[0062] Such as figure 2 , image 3 As shown, in some embodiments, said determining the angle (θ) between the positive direction of the fisheye camera image and the positive direction of the world coordinate system includes:
[0063] Place the calibration board under the fisheye camera lens, and calculate the position of each corner point on the calibration board;
[0064] The angle between the positive direction of the fisheye camera image coordinate system and the positive dir...
Embodiment 2
[0089] As described below, an embodiment of the present invention provides a device for determining the actual position of an object in a fisheye camera image, including:
[0090] a processor adapted to load and execute instructions of a software program;
[0091] A memory adapted to store a software program comprising instructions for performing the following steps:
[0092] Determine the angle θ between the positive direction of the fisheye camera image and the positive direction of the world coordinate system; specifically, include:
[0093] Place the calibration board under the fisheye camera lens, and calculate the position of each corner point on the calibration board;
[0094] The angle between the positive direction of the fisheye camera image coordinate system and the positive direction of the world coordinate system where the calibration plate is located is used as the angle θ between the positive direction of the fisheye camera image and the positive direction of the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com