

Remote cockpit applied to parallel driving system
A driving system and cockpit technology, applied in the field of parallel driving, can solve the problems of high construction cost, inability to provide a comprehensive remote cockpit, true feedback on driving experience, low deployment efficiency, etc. Realize the effect of technology promotion
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and through specific implementation methods.
[0020] Wherein, the accompanying drawings are only for illustrative purposes, showing only schematic diagrams, rather than physical drawings, and should not be construed as limitations on this patent; in order to better illustrate the embodiments of the present invention, some parts of the accompanying drawings will be omitted, Enlargement or reduction does not represent the size of the actual product; for those skilled in the art, it is understandable that certain known structures and their descriptions in the drawings may be omitted.
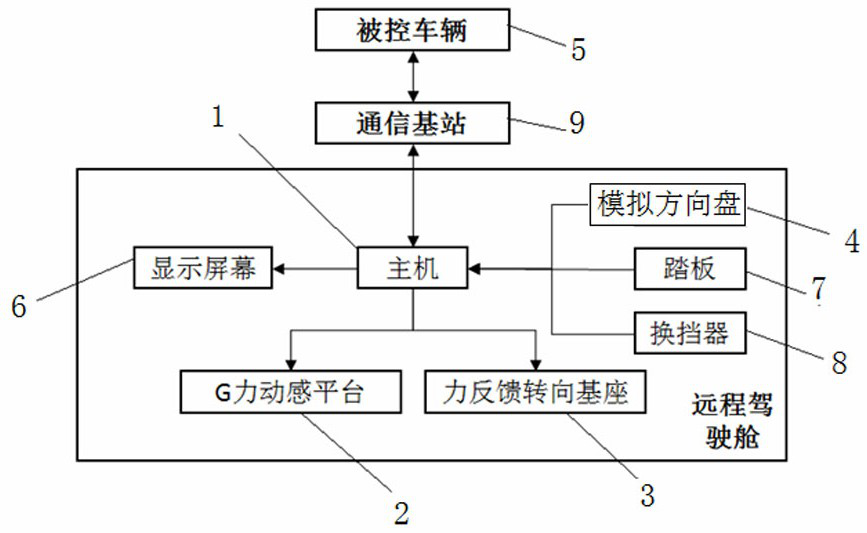
[0021] The remote cockpit applied to the parallel driving system provided by an embodiment of the present invention, such as figure 1 As shown, it includes: host 1, G force dynamic platform 2, force feedback steering base 3 and analog steering wheel 4;
[0022] The...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More