

Control method of proportional derivative and damping controller
A technology of damping controllers and control methods, which is applied to electric controllers, controllers with specific characteristics, etc., can solve problems such as non-unique solutions, complicated solution process of Lyapunov-like methods, and no general construction method, etc., to achieve improved stability output effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0025] The present invention provides a technical solution: please refer to Figure 1-2 , a proportional derivative plus damping controller control method, is characterized in that, comprising the following steps:
[0026] S1, the master teleoperator and the slave teleoperator are both a degree of freedom device and can be modeled by the following linear dynamic model;
[0027] S2, ignoring the gravity and friction terms, the PDd controller controls with synchronous master motion and slave motion;
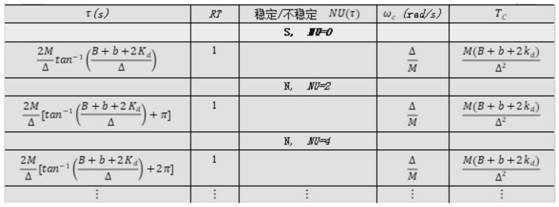
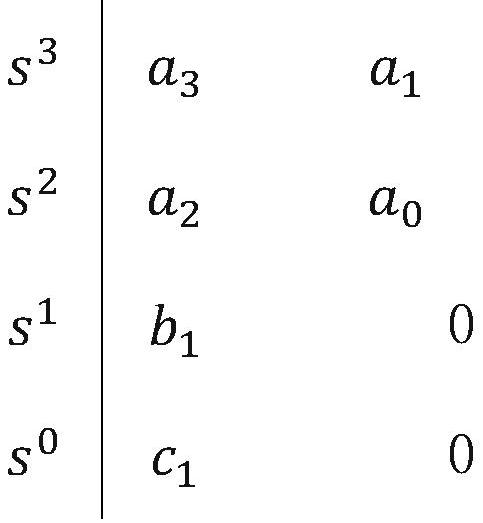
[0028] S3. Accurate stability criteria for proportional-derivative (PD) control;
[0029] S4. Accurate stability criteria for proportional damping control (Pd);
[0030] S5. Accurate stability criteria for proportional (P) control.
[0031] Specifically, according to the operation steps in S1, the linear dynamic model is recorded as formula (1) and formula (2), and formula (1) is Formula (2) is
[0032] Specifically, according to the operation steps in S1, where M i ,B i ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More