

Method and system for guiding accurate landing of unmanned aerial vehicle
A UAV, precise technology, applied in control/regulation systems, non-electric variable control, instruments, etc., can solve the requirements of accurate positioning, the position and stability of the UAV docking, and the difficulty of inductive charging of UAVs, etc. question
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0052] The principles and features of the present invention will be described below in conjunction with the accompanying drawings, and the examples given are only used to explain the present invention, and are not intended to limit the scope of the present invention.
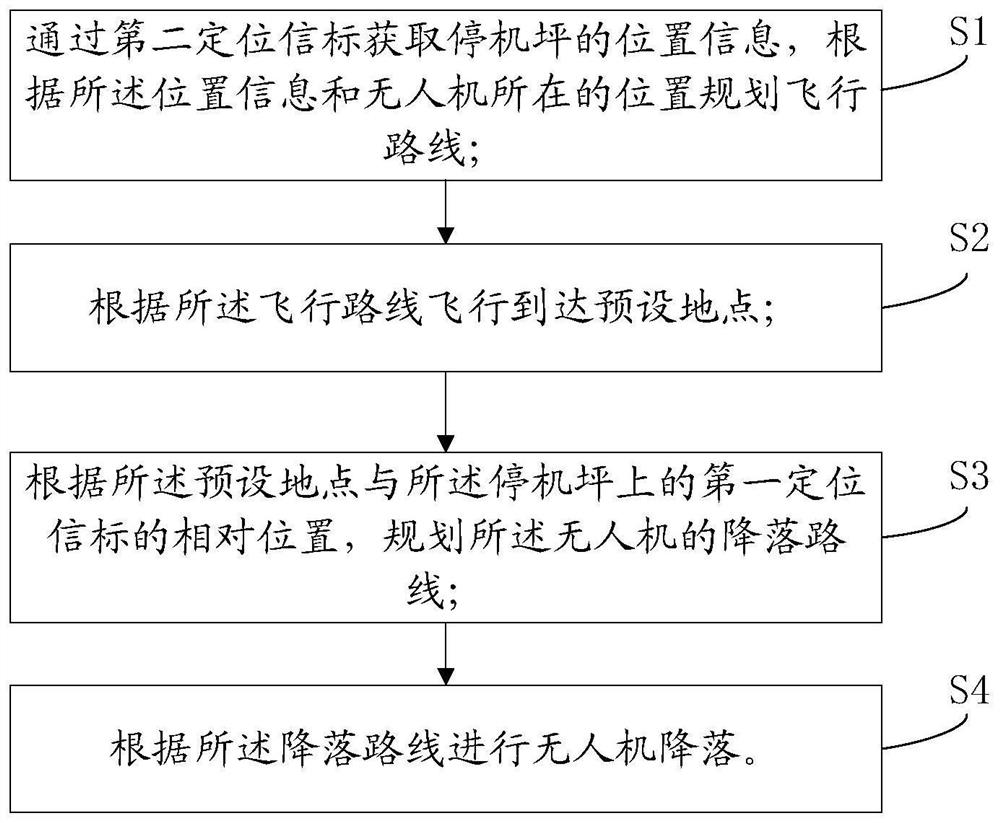
[0053] Such as figure 1 As shown, a method for guiding a drone to land precisely is provided in an embodiment of the present invention, including:
[0054] S1, obtain the location information of the apron through the second positioning beacon, and plan the flight route according to the location information and the location of the drone;
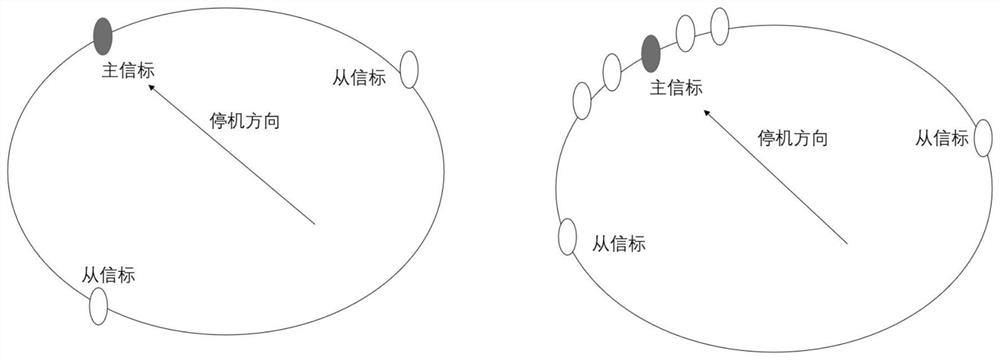
[0055] In a certain embodiment, before S1, it also includes: setting a plurality of first positioning beacons on the edge of the parking pad; where the edge of the parking pad may represent the largest circumscribed circle of the parking position of the drone.
[0056] According to the position of the charging port, the arrangement of multiple first positioning beacons is set;...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More