

Multi-unmanned aerial vehicle cooperative tracking and positioning method
A tracking and positioning, multi-UAV technology, applied in three-dimensional position/course control, vehicle position/route/altitude control, instruments, etc., can solve the problem of inaccurate estimation of the target state of the node, and reduce the amount of calculation and error The effect of small mean square error and accurate estimation results
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
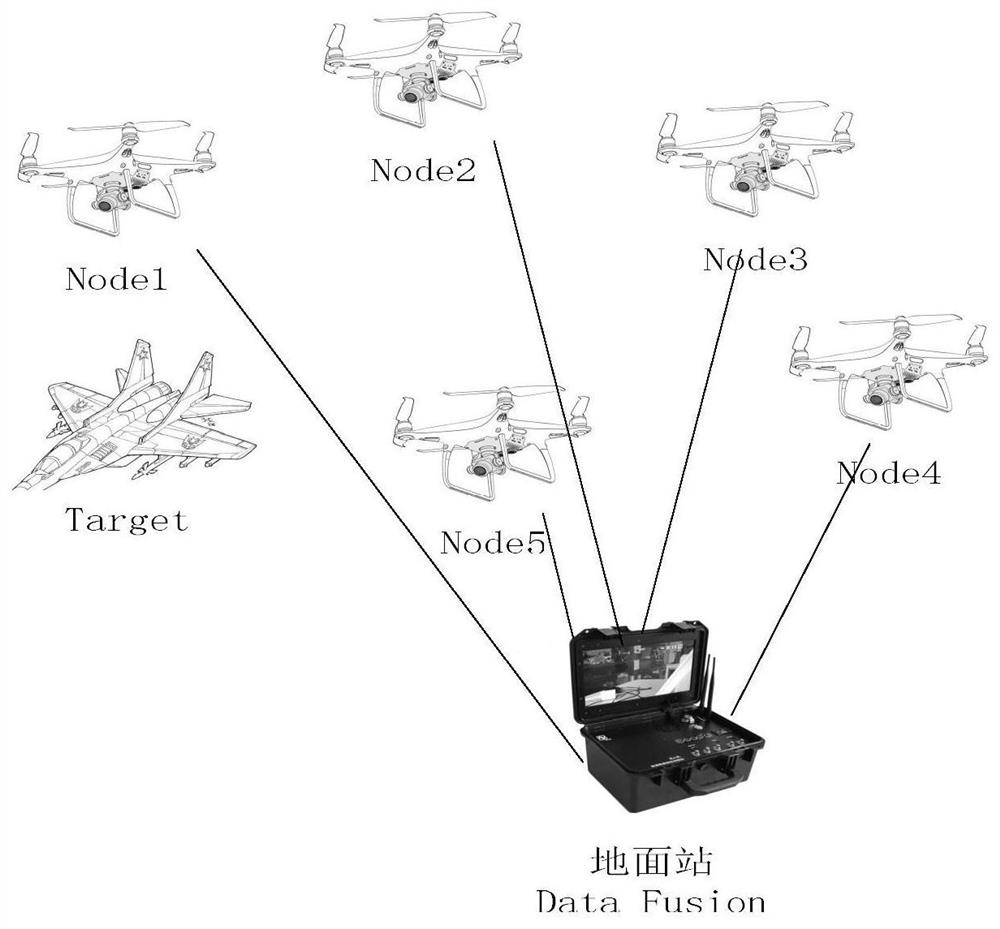
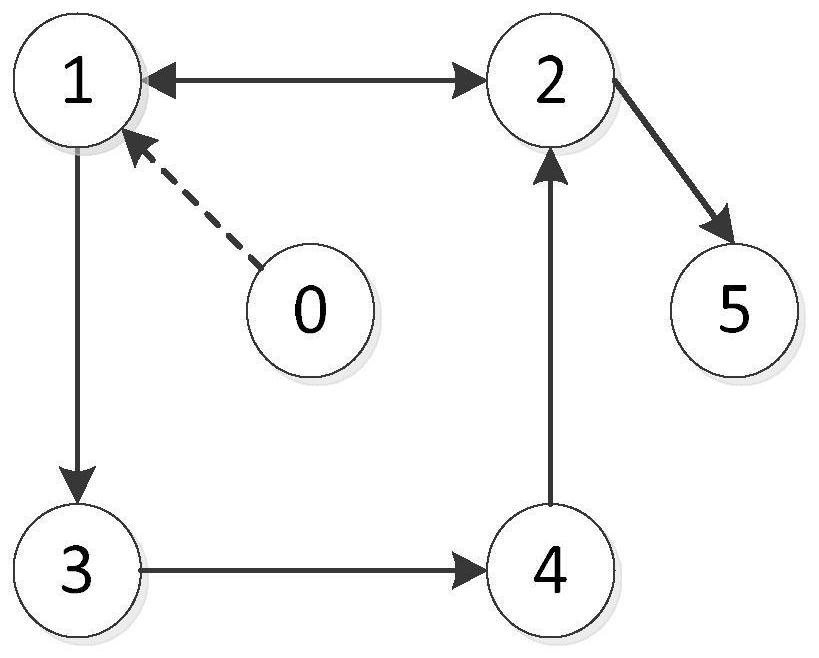
[0072] This embodiment is aimed at figure 2 The directed connected graph of the topology of the UAV is shown, and the target target0 is searched. Among them, node 1 can directly observe the target, and the new measurement value transmits state estimation information in the cyclic network for node state update.
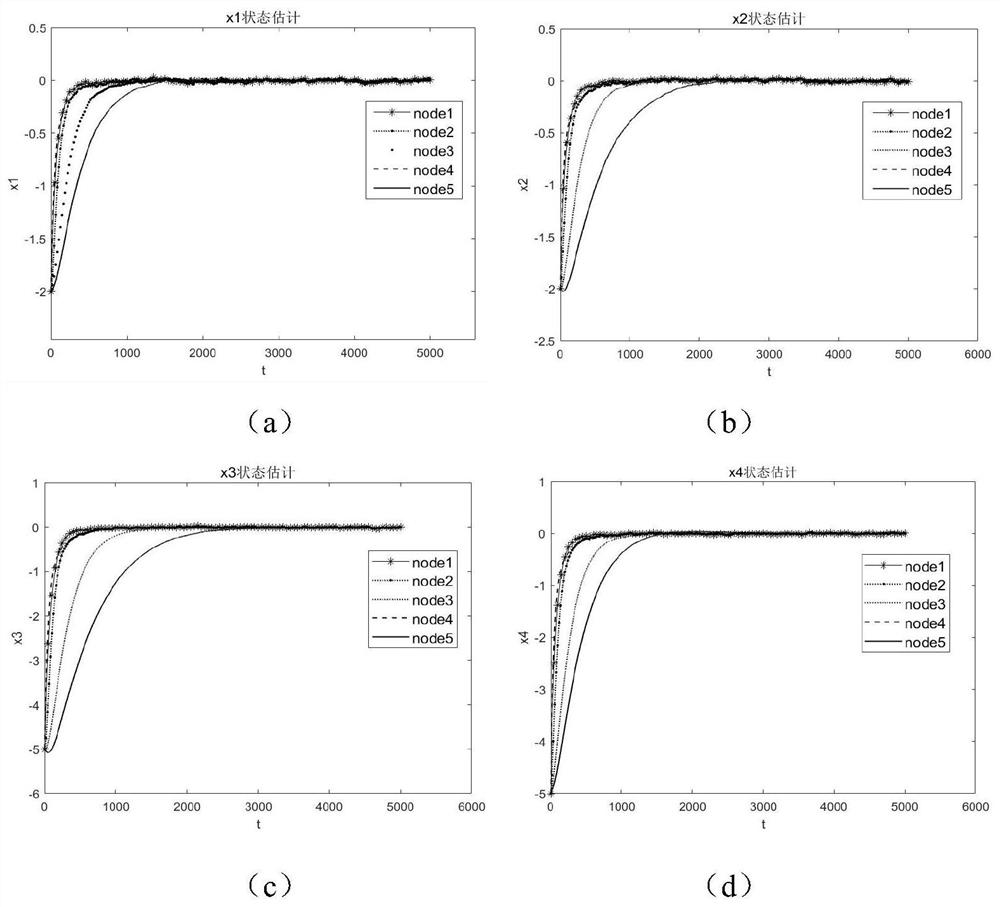
[0073] Firstly, a connected network G={v,ε,a} is established, and the IKCF algorithm is used for filtering estimation, and finally, the SFCI algorithm is used for data fusion to obtain the uniquely determined target state information. Specific steps are as follows:
[0074] Step 1. Based on the obtained network topology diagram, a directed connected graph is established according to the method of graph theory, and the connection information between the UAV sensor node and the adjacent nodes is obtained as follows:
[0075]
[0076] Step 2. Establish a linear continuous-time system model. Here, it is assumed that the system input is 0, and the target motion state ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More