Air-ground unmanned system reconnaissance cooperative path planning method based on task priority
A task priority and path planning technology, applied in the field of unmanned system navigation, can solve the problems of not considering priority reconnaissance, low endurance of small UAVs, etc., and achieve the effect of solving insufficient endurance.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0030] In order to explain the effectiveness of the algorithm of the present invention, it is possible to fully demonstrate the function of synergistic path planning, and the experiment is as follows:
[0031] (1) Experimental initial conditions and parameter settings
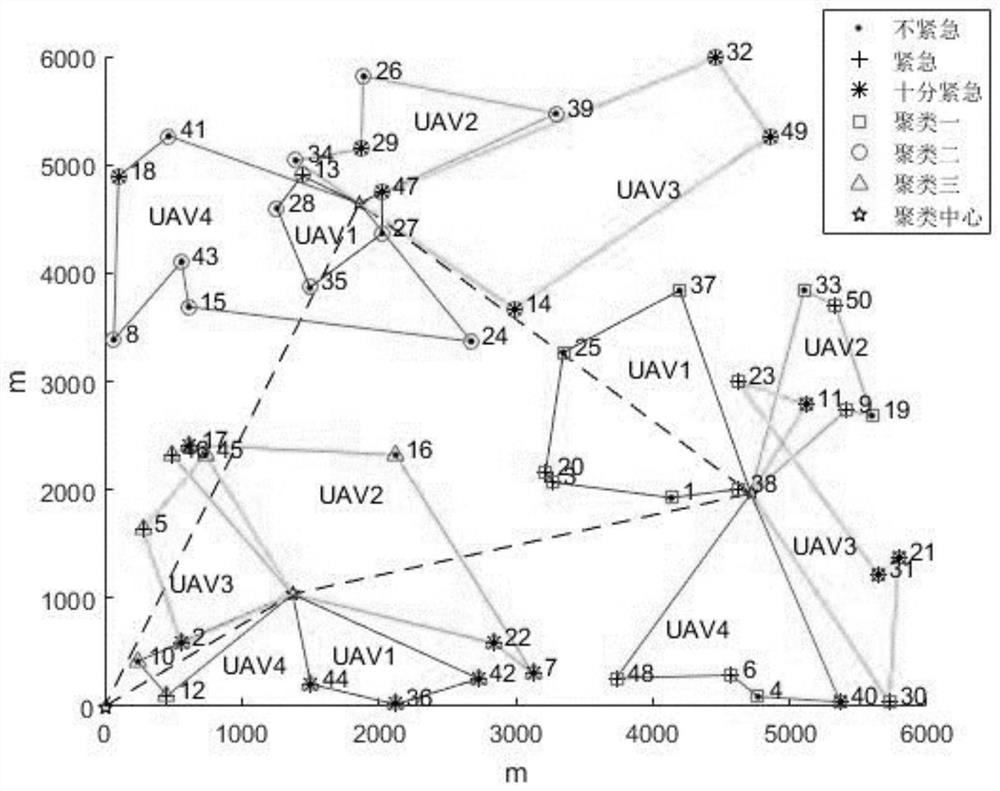
[0032] 50 task points were scattered in the region of 6000m × 6000m, and the priority of the task point was divided into 3 categories: very urgent, urgent and unstimed, replaced with numbers 3, 2, 1 in turn. The number of rotor drones n = 4, the maximum flight distance D = 10000m.
[0033] (2) Analysis of experiment
[0034] figure 2 The path simulation chart of the rotorial discharge group and the drone in this method. The digital representative task point number, Pentagar represents each clustering center, the asterisk representative is very urgent task point, the plus sign represents an urgent task point, solid point represents an unexpected task point, square, round And the triangle represents clustering, clus...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



