

Unmanned cluster task collaboration method based on multi-agent reinforcement learning
A reinforcement learning, multi-agent technology, applied in non-electric variable control, instruments, control/regulation systems, etc., can solve problems such as multiple constraints, and achieve the effect of facilitating collaboration
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific example
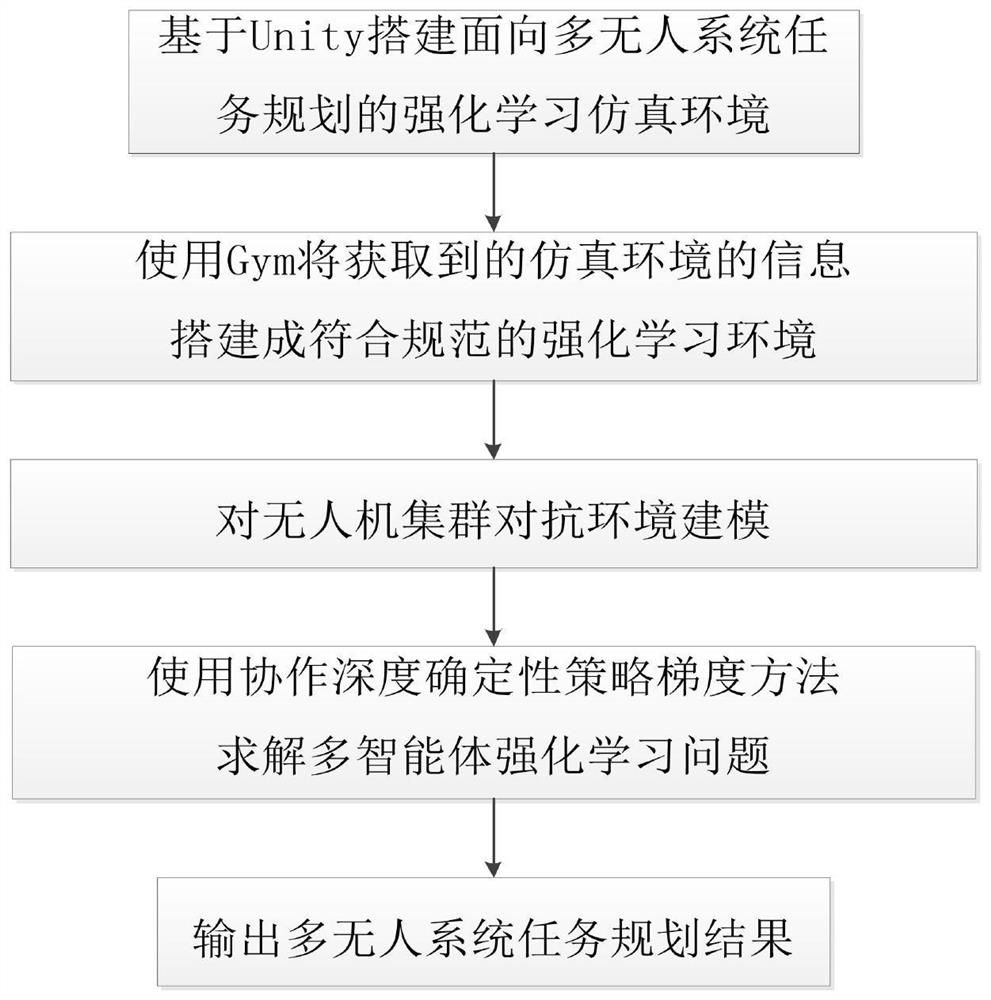
[0154] 1. Experimental conditions and methods
[0155] The hardware platform is: Intel(R) Core(TM) i5-9400F CPU@2.90GHZ, 32GB RAM;
[0156] The software platform is: Tensorflow 1.8.0, Unity 4.6.1, gym 0.17.2;
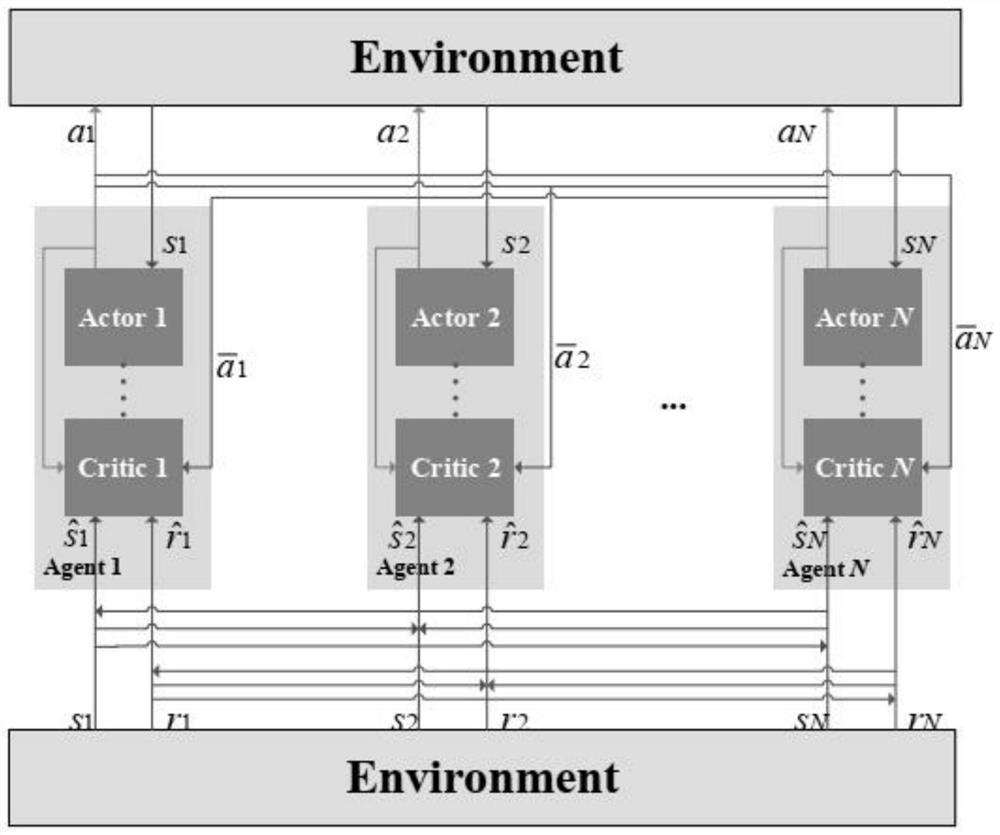
[0157] Experimental methods: deep deterministic policy gradient (DDPG), multi-agent deep deterministic policy gradient (MADDPG), collaborative deep deterministic policy gradient algorithm (CODDPG) proposed by the present invention.
[0158] 2. Simulation content and results
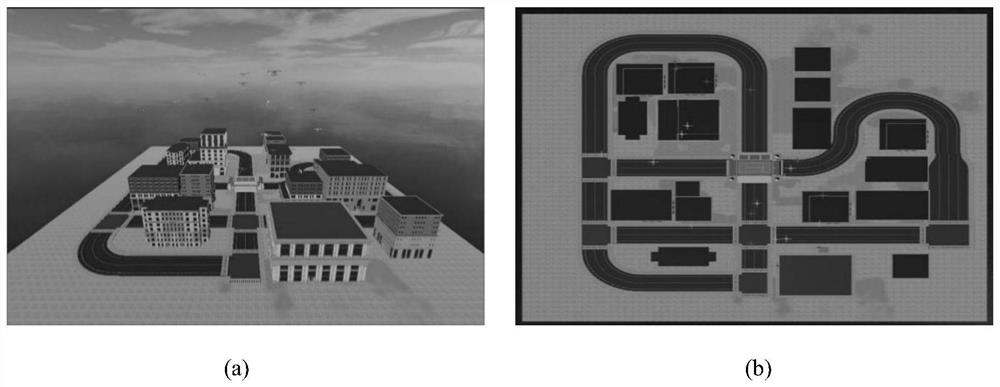
[0159] A scenario with 30 defenders and 20 intruders is set, and k=3, l=3, ψ=0.3, η=3, ζ=0.5 (k is the number of defenders required to destroy an intruder, and l is The number of UAVs that a UAV can perceive, ψ, η, ζ are the correlation coefficients of rewards), such as Figure 5 shown. At this time, the defender is concentrating on eliminating the intruder coming from the lower right. The scene ends when all invaders are eliminated or any invaders enter the target area. In this scenario, the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More