

Unknown space autonomous exploration planning method
A planning and space technology, applied in the direction of non-electric variable control, instruments, two-dimensional position/channel control, etc., can solve the problems of incomplete exploration and low exploration efficiency, improve exploration efficiency, overcome low exploration efficiency, The effect of avoiding the risk of collision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0055] The specific implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. The following examples are used to illustrate the present invention, but are not intended to limit the scope of the present invention.
[0056] In this embodiment, the laser rangefinder and the ROS operating system are carried by the robot platform; the laser rangefinder is connected with the robot rigid body platform for building maps and positioning; the ROS operating system is the post-operating system for the robot, for The method of the present invention provides an excellent development environment.
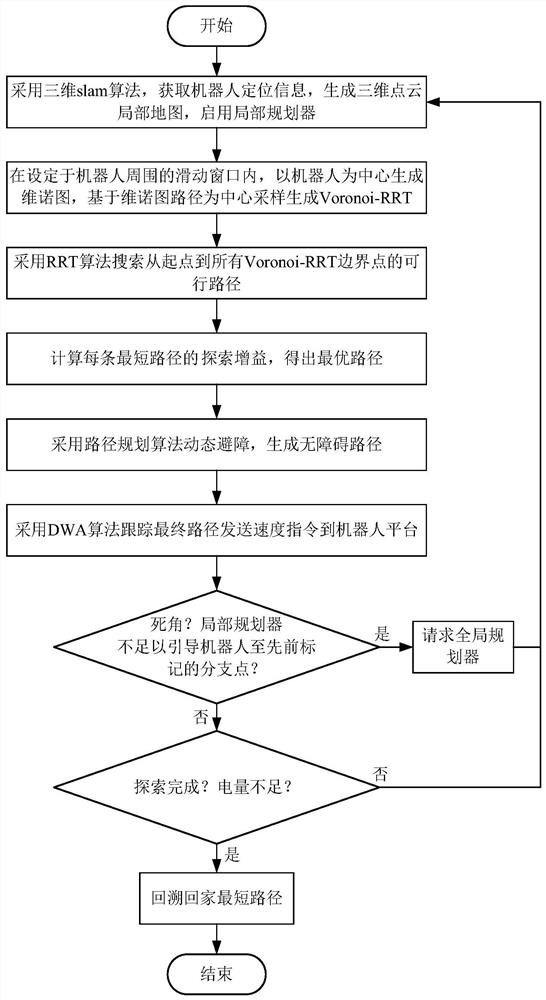
[0057] Such as figure 1 As shown, the unknown space autonomous exploration and planning method in this embodiment is as follows:
[0058] Step 1: Use the 3D SLAM algorithm to obtain the robot's current positioning information and perception information through the 3D laser sensor and IMU to generate a ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More