

Fruit and vegetable picking robot device
A technology for picking robots and fruits and vegetables, which is applied to picking machines, manipulators, harvesters, etc. It can solve the problems of high labor costs, easy to pinch fruits, and unclamping of fruits, so as to reduce workers' operation steps, reduce labor intensity, The effect of improving the clamping effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The technical solutions of the present invention will be described in detail below with reference to the accompanying drawings, but the protection scope of the present invention is not limited to the embodiments.
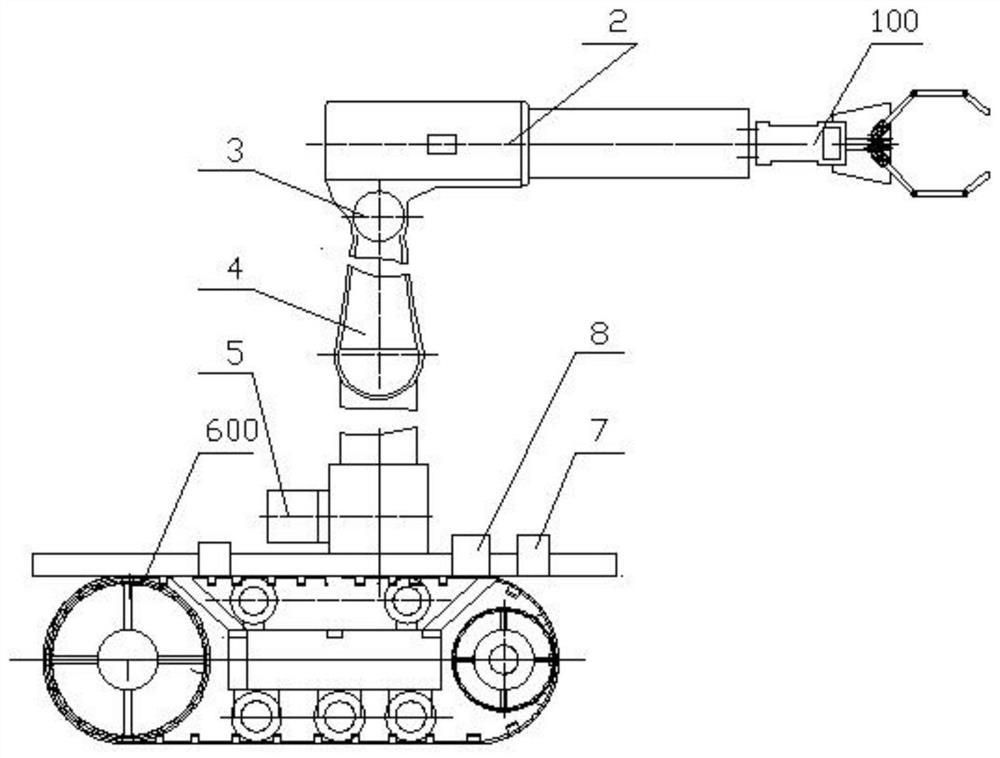
[0023] Such as Figure 1-4 As shown, a fruit and vegetable picking robot device includes a picking robot mechanical structure, and the picking robot mechanical structure includes an intelligent mobile platform 600 and a manipulator assembly 100; the intelligent mobile platform 600 is provided with a mechanical arm assembly;
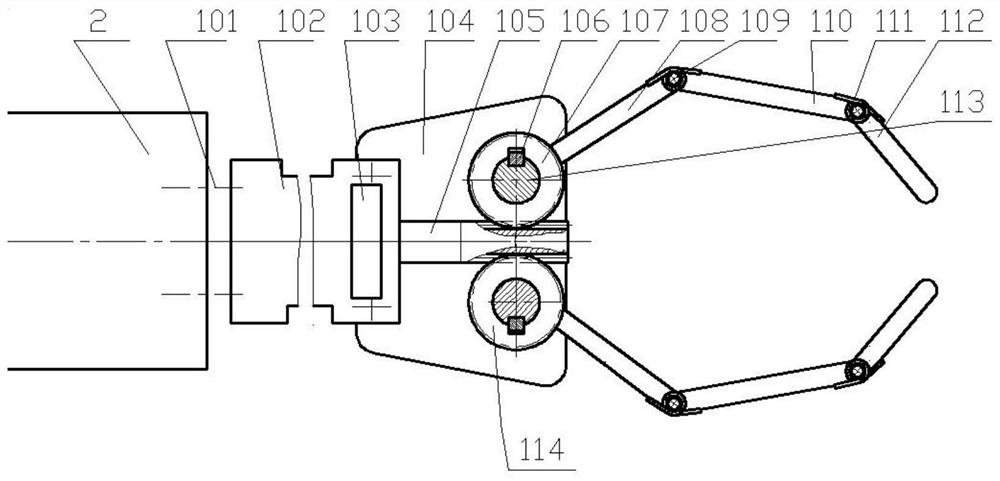
[0024] The manipulator assembly 100 includes a cylinder 102, a support plate 104 and two clamping claws, the left end of the cylinder 102 is fixed on the mechanical arm assembly by a bolt 101, and the support plate 104 is fixed on the right end of the cylinder 102 by a screw On one side of the support plate 104 parallel to the piston rod of the cylinder 102; the support plate 104 is provided with two gear fixed shafts 113, and the gear f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More