

Fault estimation observation method and device for nonlinear system with disturbance
A nonlinear system and fault estimation technology, applied in general control systems, control/regulation systems, instruments, etc., can solve problems such as difficult to detect the size and type of faults, and achieve easy research, fast and accurate tracking, and increased accuracy sexual effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
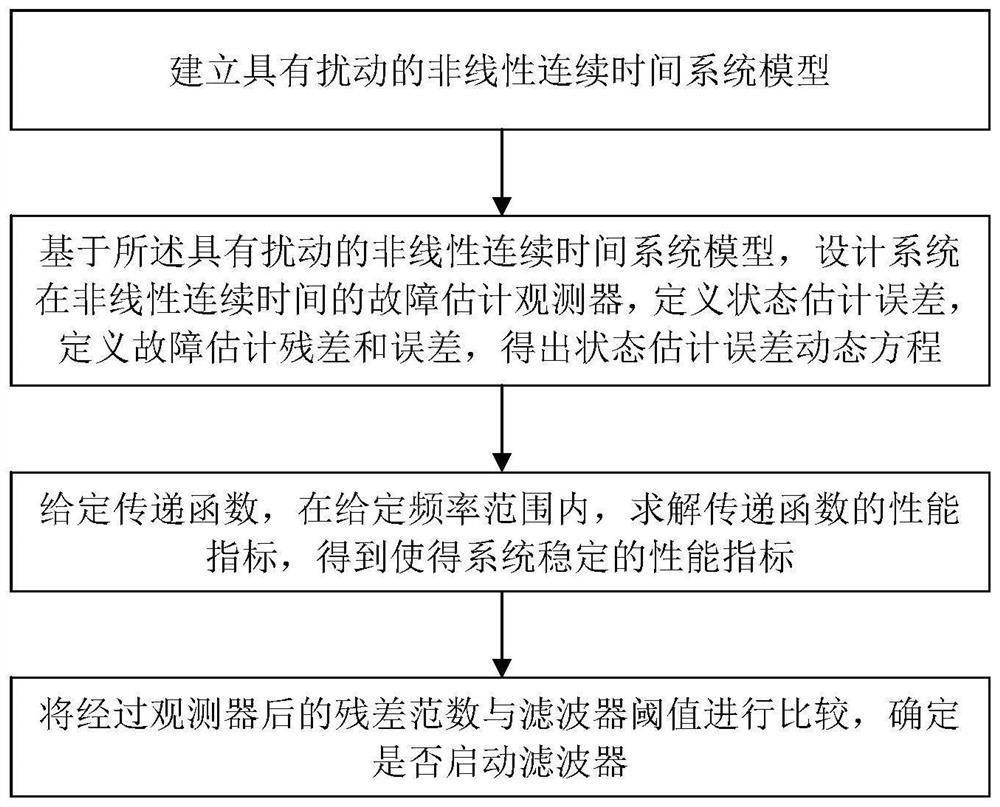
[0029] refer to figure 1 , Embodiment one of the present invention provides a kind of nonlinear system fault estimation observation method with disturbance, described method comprises the following steps:
[0030] S1: Modeling a nonlinear continuous-time system with disturbances.
[0031] The nonlinear continuous-time system model with disturbance is as follows:
[0032]
[0033] In the above formula: x(t)∈R a is the state of the system, u(t)∈R m is the system input, y(t)∈R p is the output of the system, f(t)∈R q is an additive fault signal and satisfies f 0 is a known constant, d(t)∈R q is the interference signal, A, B, and C are dimension-appropriate matrices, F is the fault matrix, D is the disturbance signal matrix, M is the nonlinear function matrix, and the matrix E is singular, that is, rank(E)≤n, g(t, x(t))∈R q It is a continuous nonlinear vector function, assuming that g(t,x(t)) satisfies the Lipschitz condition, there is a Lipschitz constant L g makes: ...
Embodiment 2
[0154] refer to Figure 8 , Embodiment 2 of the present invention provides a nonlinear system fault estimation and observation device with disturbance, the device includes: an establishment module, a design module, a solution module and a startup module. The various modules are specifically used for:
[0155] The building module is used for building a nonlinear continuous time system model with disturbance.
[0156] The nonlinear continuous-time system model with disturbance is as follows:
[0157]
[0158] In the above formula: x(t)∈R a is the state of the system, u(t)∈R m is the system input, y(t)∈R p is the output of the system, f(t)∈R q is an additive fault signal and satisfies f 0 is a known constant, d(t)∈R q is the interference signal, A, B, and C are dimension-appropriate matrices, F is the fault matrix, D is the disturbance signal matrix, M is the nonlinear function matrix, and the matrix E is singular, that is, rank(E)≤n, g(t, x(t))∈R q is a continuous ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More