

Mechanical arm joint control system, method and equipment and storage medium
A control system and control method technology, applied in the field of feedback control, can solve problems such as slow response of the closed-loop system, saturation of the control amount, and oscillation, and achieve the effects of improving control effect, low noise amplification effect, and avoiding side effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
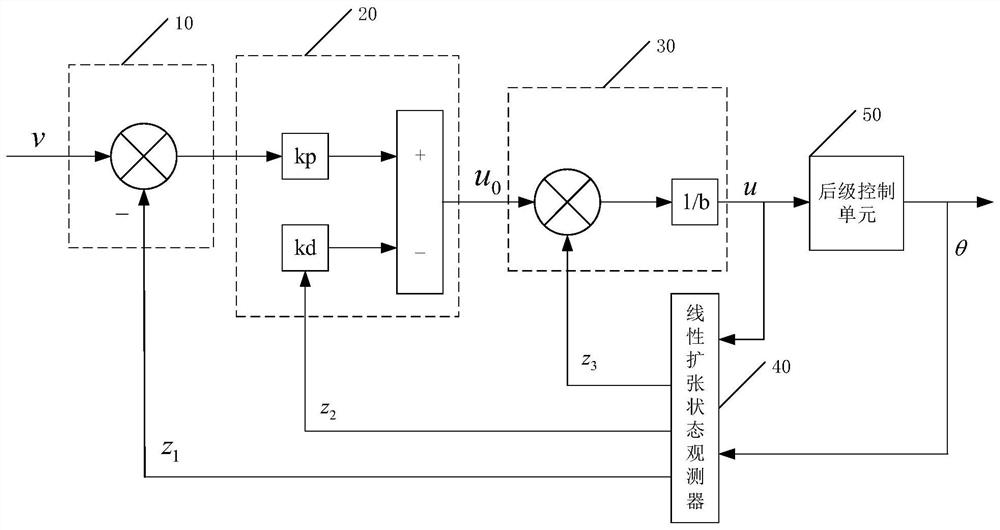
[0044] The core of the present invention is to provide a control system for the joints of the manipulator, which can actively suppress the disturbance, avoid the side effects of the integral link, make the differential link play a role, and at the same time, the noise amplification effect is very low, thus improving the control of the joints of the manipulator The effect can effectively guarantee the rapidity and accuracy of control.
[0045] In order to enable those skilled in the art to better understand the solution of the present invention, the present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments. Apparently, the described embodiments are only some of the embodiments of the present invention, but not all of them. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More