

Control method, device, storage medium and electronic equipment of unmanned vehicle
A control method and technology for unmanned vehicles, applied in the field of devices, storage media and electronic equipment, and control methods for unmanned vehicles, can solve problems such as large manpower operating costs, failure of automatic driving system obstacle avoidance measures, etc., to improve efficiency and Accuracy, reduce labor operating costs, and ensure the effect of vehicle safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0057] Specific embodiments of the present disclosure will be described in detail below in conjunction with the accompanying drawings. It should be understood that the specific embodiments described here are only used to illustrate and explain the present disclosure, and are not intended to limit the present disclosure.
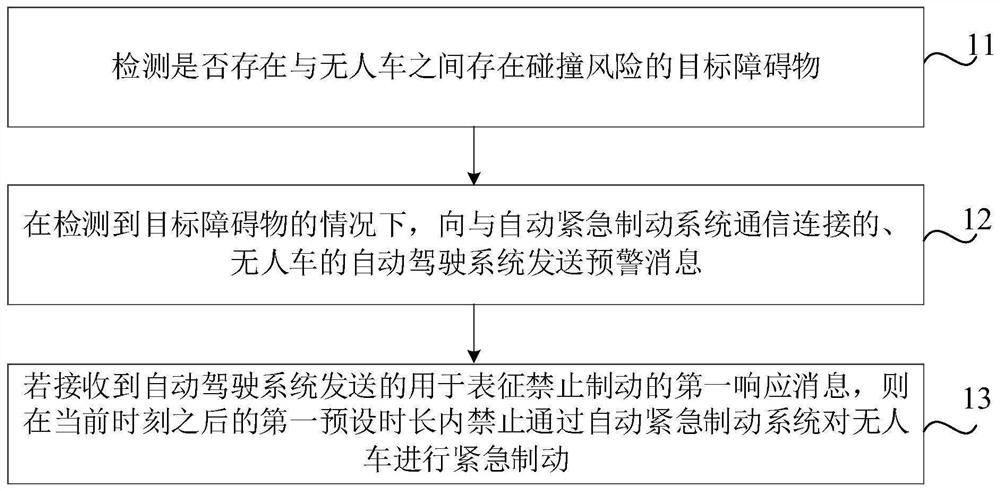
[0058] figure 1 It is a flowchart of a control method for an unmanned vehicle provided according to an embodiment of the present disclosure, which is applied to an automatic emergency braking system (ie, an AEB system) of an unmanned vehicle. Such as figure 1 As shown, the method provided by the present disclosure may include the following steps 11 to 13:
[0059] In step 11, it is detected whether there is a target obstacle with a risk of collision with the unmanned vehicle.
[0060] Wherein, the target obstacle may be a static obstacle or a dynamic obstacle. For example, the target obstacle may be a vehicle that affects the driving safety of the unmanne...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More