Hybrid unmanned aerial vehicle autonomous detection method based on boundary and sampling
An autonomous detection and unmanned aerial vehicle technology, applied in non-electric variable control, instruments, control/regulation systems, etc., can solve the problems of airborne energy constraints, low energy consumption, and small calculation amount, so as to improve the efficiency of exploration and exploration. Less time, high efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only part of the embodiments of the present invention, not all of them. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
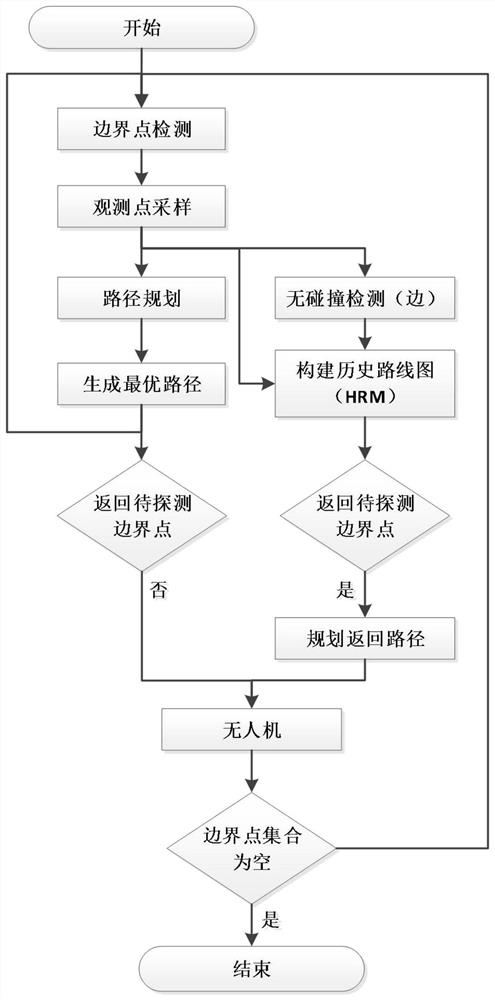
[0038] Such as figure 1 As shown, a kind of hybrid unmanned aerial vehicle autonomous detection method based on boundary and sampling of the present invention, this method is carried out iteratively constantly, and the step in one iteration is:
[0039] First, the detection and extraction of boundary points are carried out according to the proposed strategy;
[0040] Secondly, based on the extracted boundary points, continue to sample the observa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More