

Multi-unmanned aerial vehicle cooperative attack and defense confrontation method based on strategy set MADDPG
A multi-UAV and UAV technology, applied in the direction of non-electric variable control, instrument, control/adjustment system, etc., can solve dynamic instability and other problems, and achieve the effect of high attack and defense efficiency and good coordinated attack and defense confrontation ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The technical solution of the present invention is described in detail in combination with the accompanying drawings.
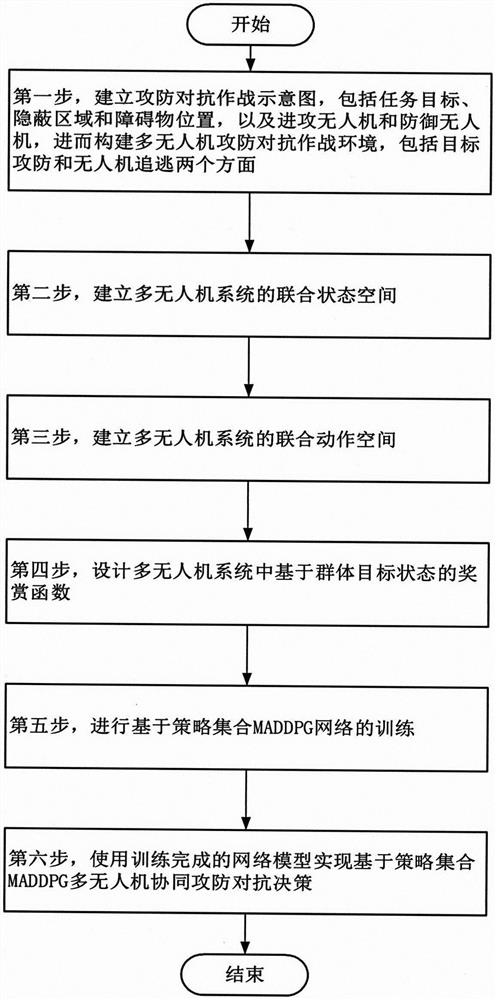
[0023] Such as figure 1 As shown, the present invention is based on the strategy set MADDPG multi-UAV cooperative attack and defense confrontation method, which specifically includes the following steps:
[0024] Step 1. Establish a schematic diagram of multi-UAV cooperative offensive and defensive confrontation operations, including mission targets, hidden areas, and obstacle locations, as well as offensive and defensive UAVs, and then construct multi-UAV offensive and defensive confrontation combat missions, including target attack and defense and There are two aspects of UAV chasing and fleeing. The specific process is as follows:
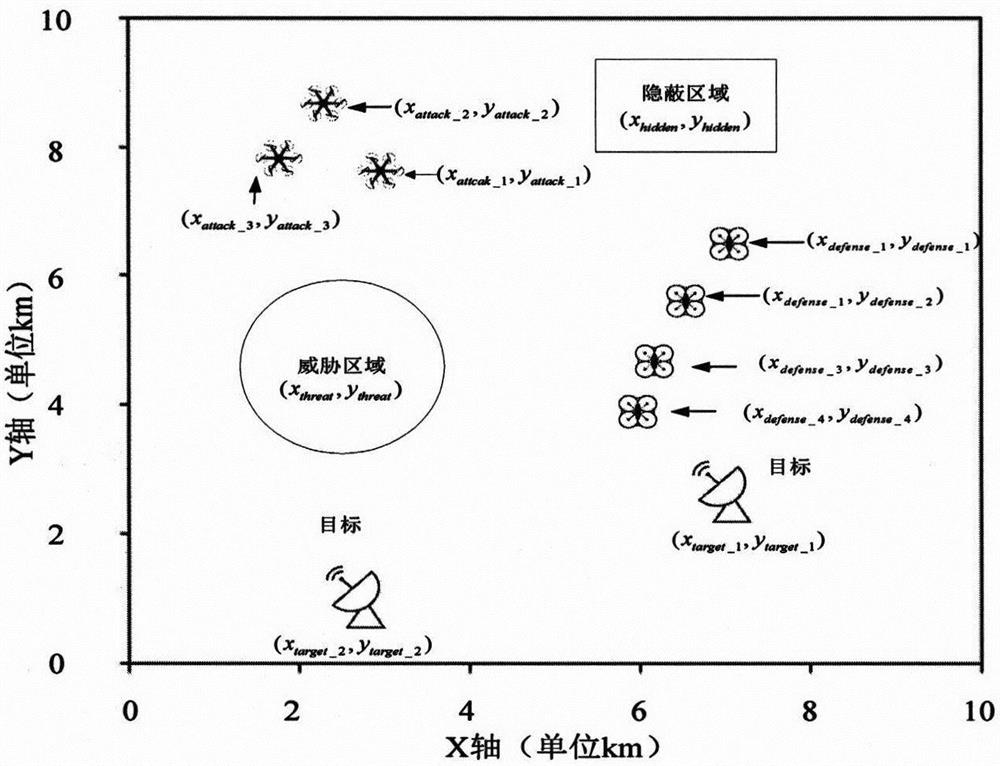
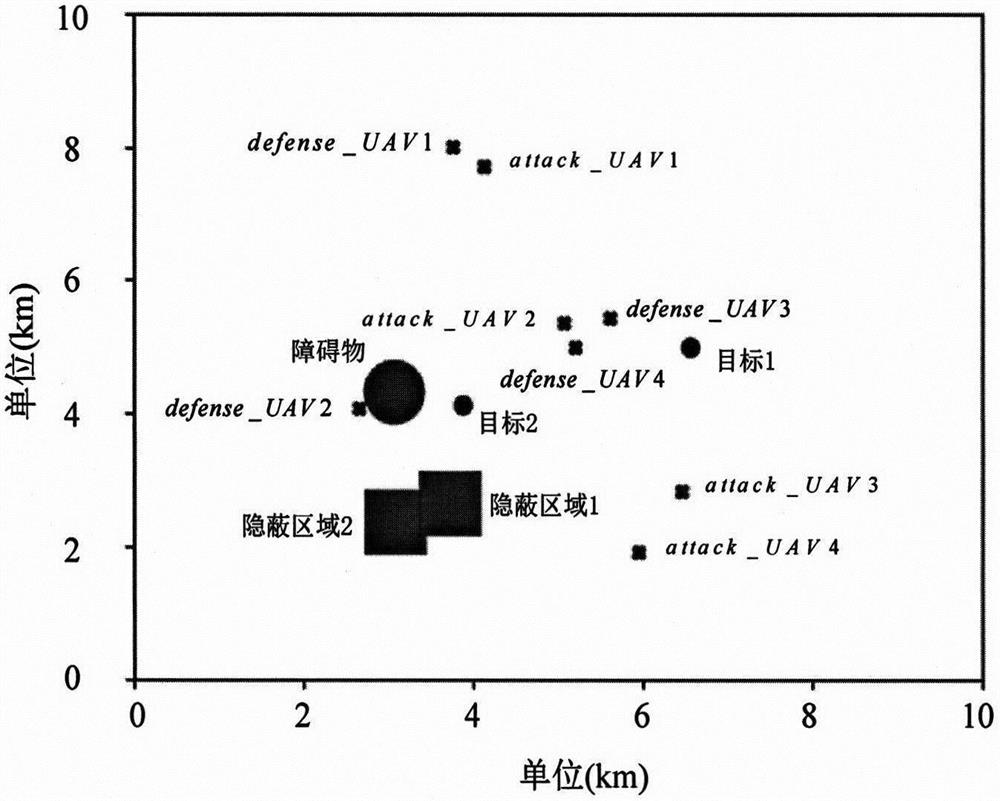
[0025] (1.1) Establish a schematic diagram of multi-UAV cooperative attack and defense confrontation, such as figure 2 As shown, in the area (0km~2km, 7km~10km), 3 offensive UAVs are randomly generated, and the initia...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More