

Tree-climbing pruning robot
A robot and pruning technology, applied in the field of robotics, can solve problems such as long time consumption, damage to drones, and changes in flight balance, and achieve the effects of improving climbing efficiency, saving costs, and improving stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
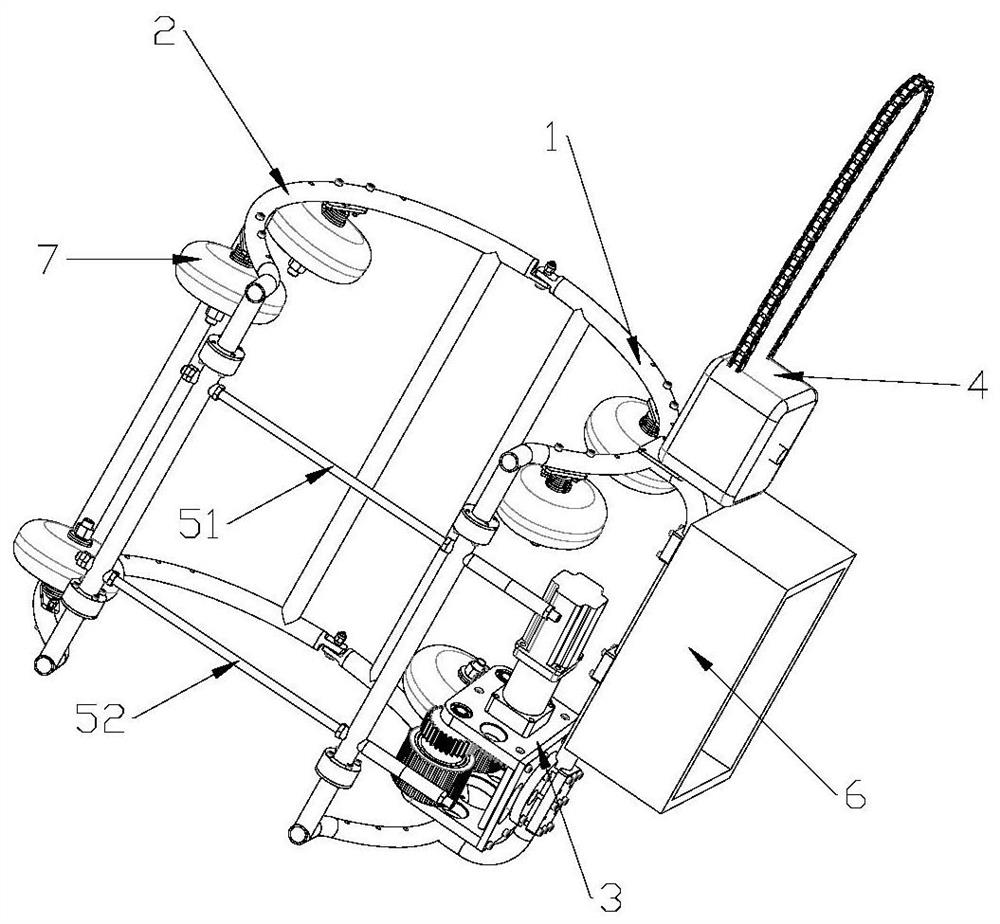
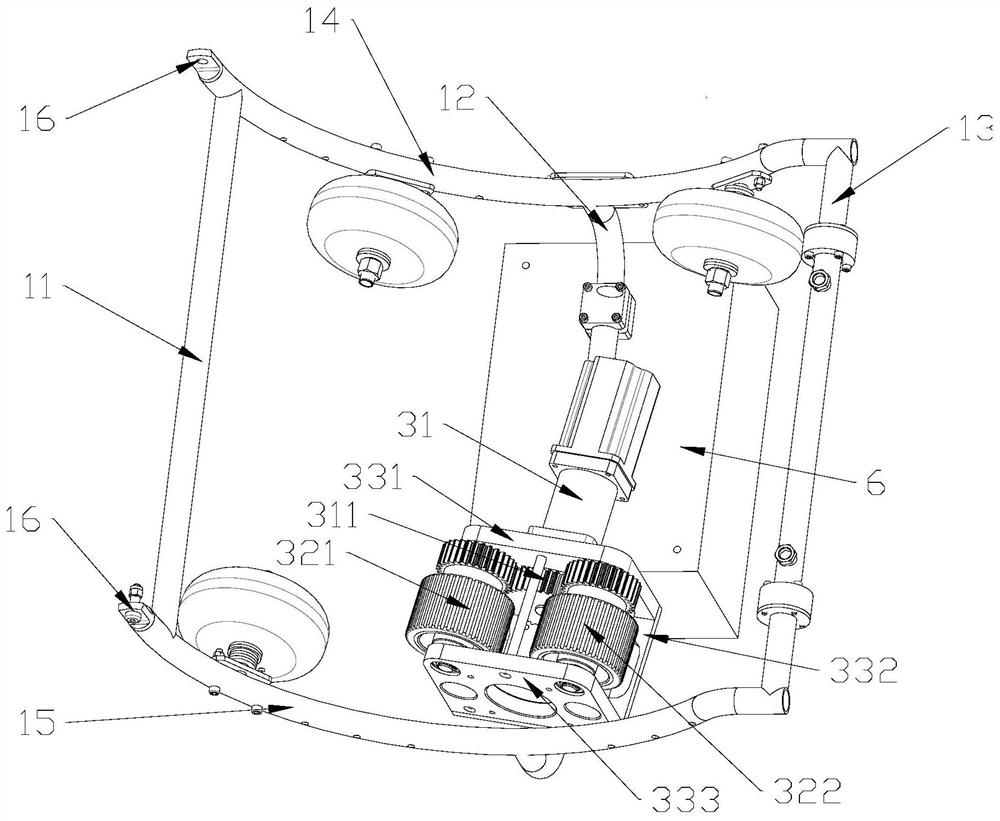
[0034] figure 1 A schematic structural diagram of a tree-climbing and pruning robot provided by an embodiment of the present invention is shown. The tree-climbing and pruning robot includes an upper frame 1, a chainsaw 4, a lower frame 2 and a driving mechanism 3, wherein: the upper frame 1 has a One end is connected with one end of the lower frame 2 , the drive mechanism 3 is obliquely arranged on the upper frame 1 , the chainsaw 4 is arranged on the upper frame 1 , the second end of the upper frame 1 and the lower frame 2 The second end is connected based on the screw 5 ; specifically, the electric saw 4 is arranged above the driving mechanism 3 . Here, the upper frame 1, the lower frame 2 and the screw 5 can form a closed circle based on the trunk of the tree. The tree-climbing and pruning robot passes the upper frame 1 and the lower frame 2 to surround the trunk of the tree. The screw 5 Fix the upper frame 1 and the lower frame 2, the upper frame 1 has a driving mechanism...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More