

Force-position sensing method and system for two-degree-of-freedom limb joints
A degree of freedom and limb technology, applied in passive exercise equipment, physical therapy and other directions, can solve problems such as injury and the inability to realize the perception of human joint force and position, so as to reduce the burden on patients, improve protection and comfort, and improve information interaction. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0071] Preferred embodiments of the present invention are described below with reference to the accompanying drawings. Those skilled in the art should understand that these embodiments are only used to explain the technical principles of the present invention, and are not intended to limit the protection scope of the present invention.
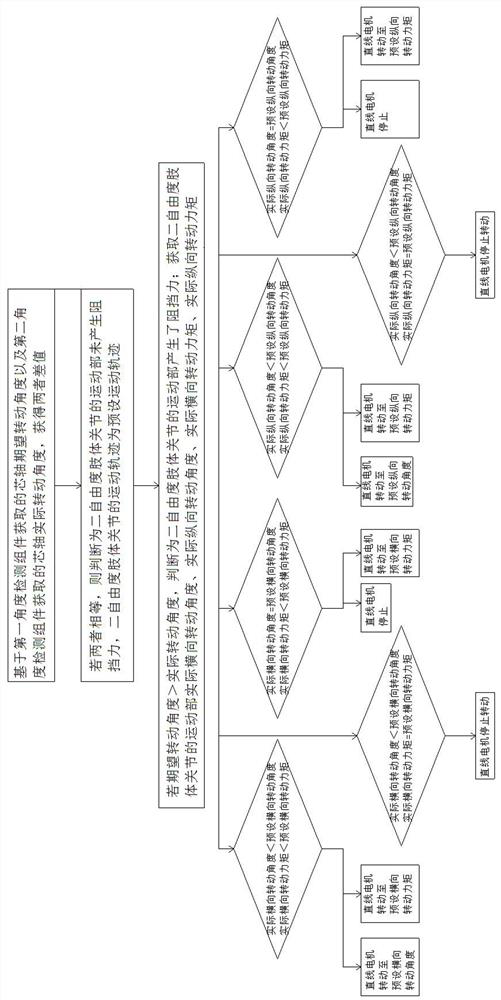
[0072] The first aspect of the present invention provides a force position sensing method for two-degree-of-freedom limb joints, the method includes the following steps: Step S100, based on the expected rotation angle of the mandrel obtained by the first angle detection component And the actual rotation angle of the mandrel obtained by the second angle detection component ,get , - ; Wherein, the mandrel is the connecting shaft of the drive mechanism and the motion actuator; step S200, if , it is judged that the movement part of the two-degree-of-freedom limb joint does not produce blocking force, and the motion trajectory of the two-...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More