High-precision map precision detection method based on projection transformation
A technology of projection transformation and accuracy detection, applied in image analysis, image data processing, graphics and image conversion, etc., can solve the problems of infeasibility, single high-precision map detection method, and inability to high-precision map detection, etc., to improve the accuracy Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment
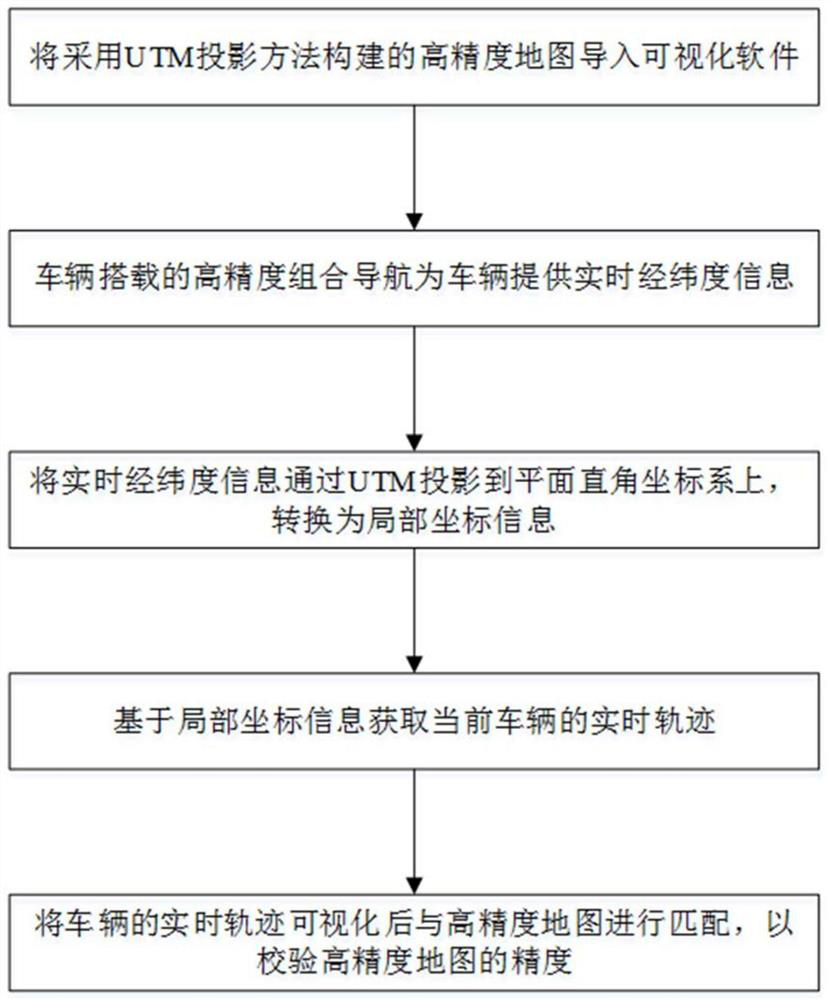
[0035] The present invention provides a high-precision map accuracy detecting method based on projected transformation, which is passed through a vehicle mount combined inertial guide device, which is built in a high-precision map area, collects real-time latitude and latitude information of current vehicles, due to latitude and longitude Intuitive reflecting the distance information under the right angle coordinate system, the same projection transformation method using high precision maps is required to control variables, the projection transform method includes UTM projection (General Horizontal Mo Jumo projection method), TM projection (Horizontal Metal Tour) and Gaussian Projection, the high-precision map accuracy detection method proposed by this method uses a UTM projection method to construct high precision maps, and detect high precision map accuracy based on the UTM projection method.
[0036] The UTM coordinate projected as an ellipsoid, the centerline of the elliptical...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com