

Vehicle trajectory prediction method based on uncertainty estimation
An uncertainty and vehicle trajectory technology, which is applied in the field of vehicle trajectory prediction based on uncertainty estimation, which can solve the problems of incomplete trajectory multi-modal modeling and ignoring the uncertainty of the input vehicle historical pose.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
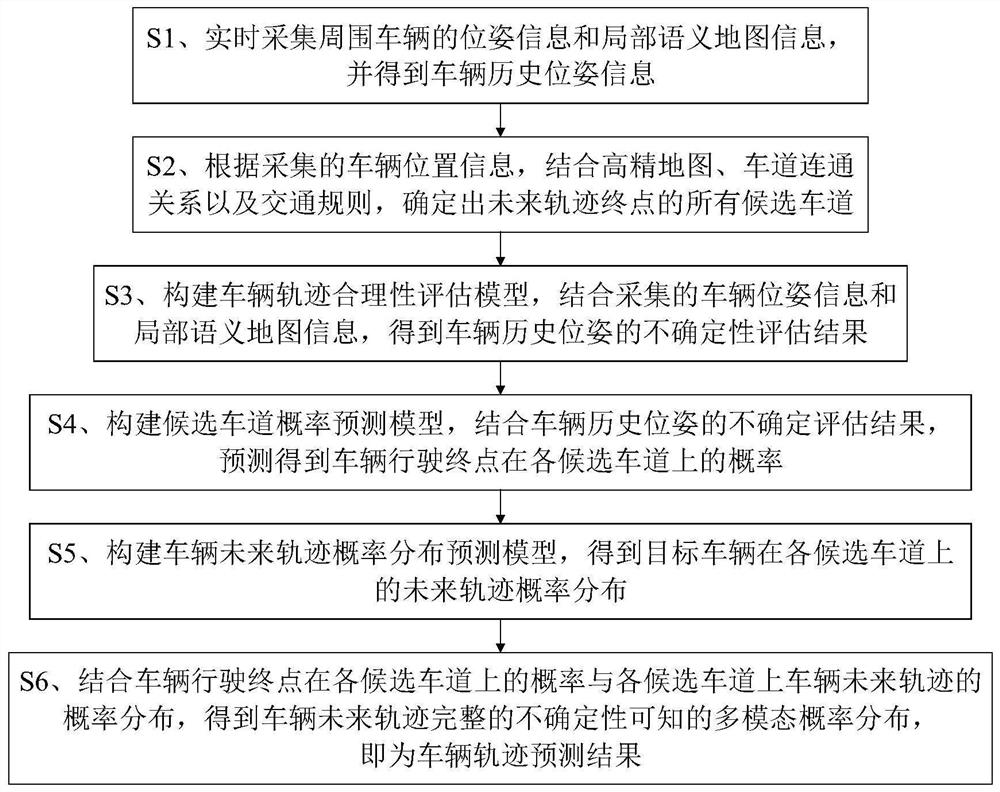
[0082] like figure 1 As shown, a vehicle trajectory prediction method based on uncertainty estimation includes the following steps:
[0083] S1. Collect the pose information and local semantic map information of the surrounding vehicles in real time, and obtain the historical pose information of the vehicle, where the pose information includes vehicle position information, vehicle speed information, vehicle acceleration information and vehicle heading angle information:
[0084]
[0085] In the formula, is the pose information of the i-th vehicle at time t, is the corresponding vehicle location information, is the corresponding vehicle speed information, is the corresponding vehicle acceleration information, is the corresponding vehicle heading angle information;
[0086] From this, the historical pose information of the vehicle can be obtained as follows:
[0087]
[0088] In the formula, is the historical pose information of the i-th vehicle at time t, and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More