

A path tracking method for unmanned vehicles based on lssvm
An unmanned vehicle and path tracking technology, which is applied in the field of unmanned vehicle path tracking control, can solve complex work and other problems, and achieve the effects of simplified work, stable transmission time lag, and simple use
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
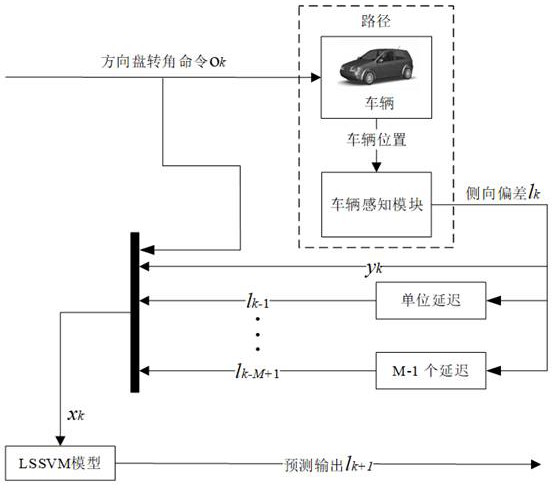
[0121] On the hardware-in-the-loop simulation experiment platform, the controller designed by the method of the present invention is used to carry out the vehicle path tracking experiment, and the tracked path is the Alt 3 Road path.
[0122] The longitudinal speed of the vehicle model is controlled by a PI controller, and the longitudinal speed is constantly changing while the vehicle is running. During the experiment, the controller command is transmitted to the steering wheel motor driver through the CAN network, and the motor driver drives the steering wheel motor to rotate, thus making the steering wheel rotate at a certain angle.
[0123] The steering wheel angle sensor transmits the angle to the controller through the CAN network, and the controller inputs the angle into the CarSim model, and the CarSim software calculates the lateral error between the vehicle model and the given path.
[0124] The controller calculates the control command again according to the lateral...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More