Multi-quadrotor unmanned aerial vehicle safe formation control method based on tracking differentiator
A four-rotor UAV, tracking differentiator technology, applied in non-electric variable control, control/regulation system, three-dimensional position/channel control and other directions, can solve the problems of parameter uncertainty, transient performance deterioration, external interference and so on , to achieve the effect of enhancing robustness, avoiding differential explosion, and overcoming parameter uncertainty
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0062] The specific implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings.
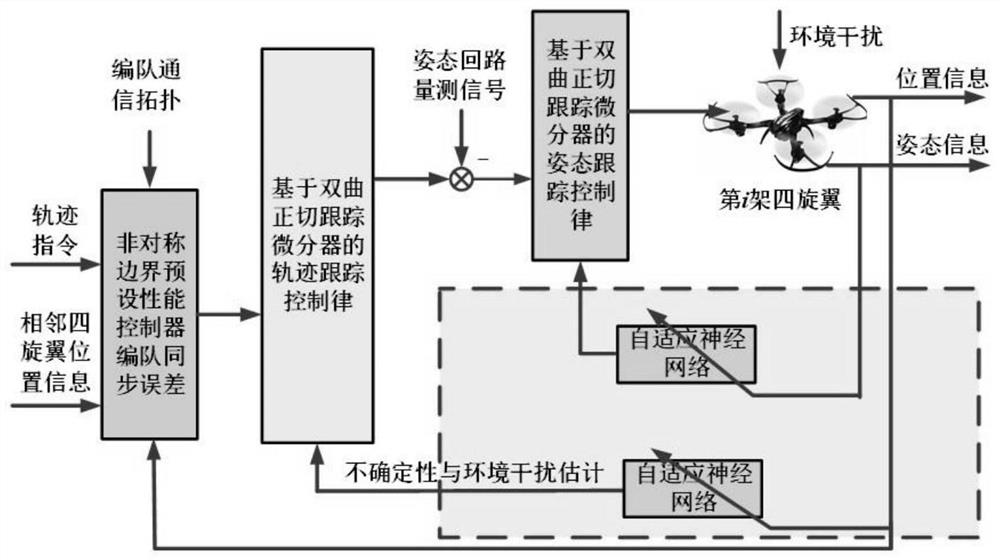
[0063] The present invention designs a multi-quadrotor unmanned aerial vehicle security formation control method based on the tracking differentiator, such as figure 1 As shown, in practical applications, the following steps are executed in real time according to timing.
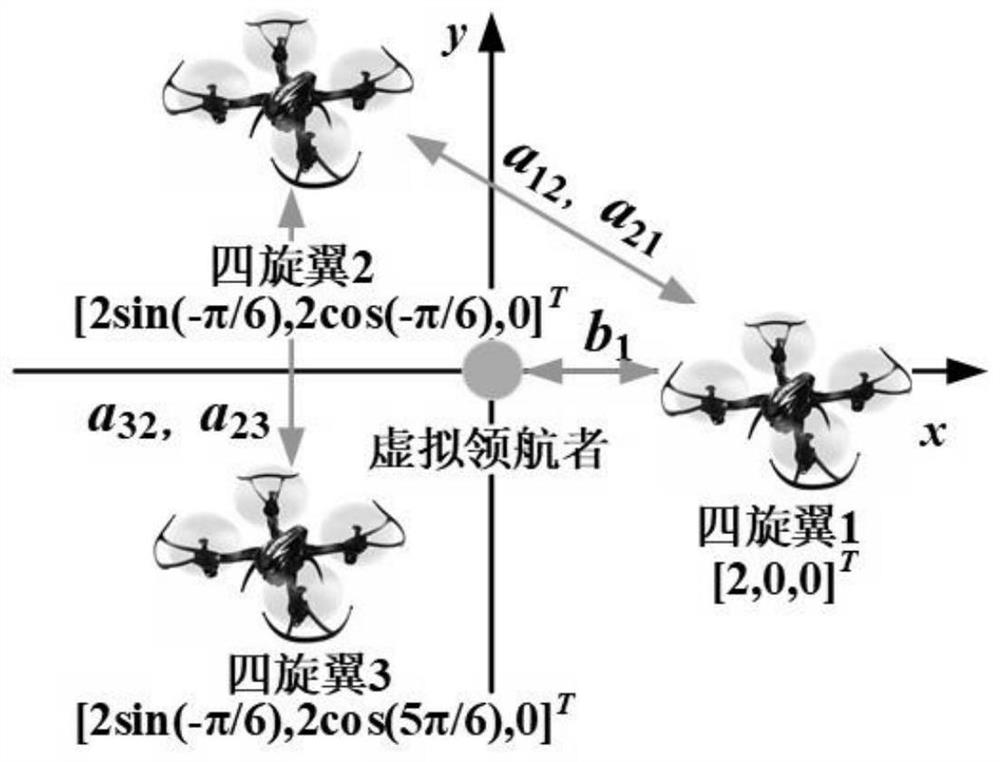
[0064] Step A. For the preset number of quadrotor UAVs, each quadrotor UAV communicates with each other, and at least one quadrotor UAV obtains the information of the virtual leader as the goal, and constructs all quadrotor UAVs The corresponding formation style and communication topology structure, and obtain the constraint models corresponding to each quadrotor UAV, and then obtain the constrained synchronous error of the coordinated formation corresponding to each quadrotor UAV, and then enter the step b.
[0065] In the practical application of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More